

Prediction method suitable for movement track of non-cooperative spinning object in space
A non-cooperative target, motion trajectory technology, applied in neural learning methods, image data processing, instruments, etc., can solve the problem that the prediction accuracy is difficult to effectively improve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
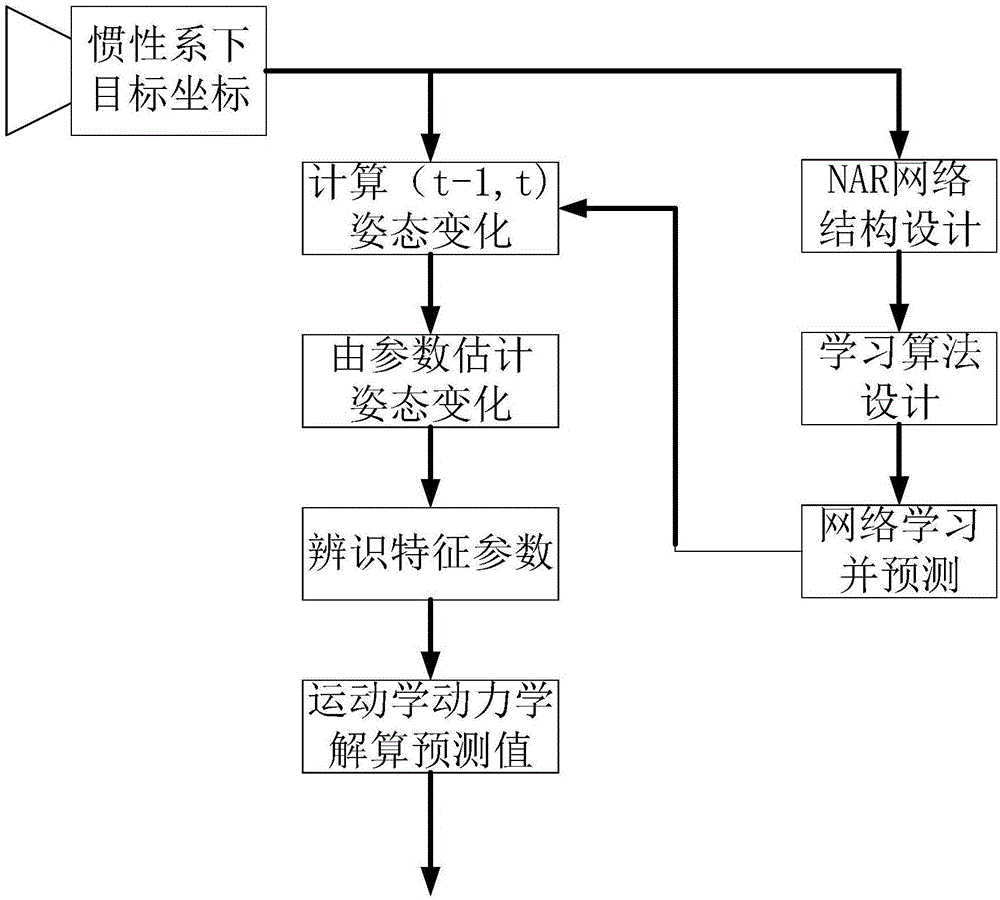
[0076] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0077] Such as figure 1 As shown, the detection method for obstacles near the capture point of the space tethered robot provided by the embodiment of the present invention includes:
[0078] Step 1: Calculate the target position in the camera coordinate system
[0079] Let the target position in the camera coordinate system be P(x c ,y c ,z c ), the target’s imaging position (u, v) in the camera coordinate system, the following formula holds:
[0080]
[0081] where (u 0 ,v 0 ) is the center of the image coordinate system, (a x ,a y ) is the effective focal length.
[0082] Step 2: Calculate the target position in the inertial coordinate system
[0083] Coordinate P(x w ,y w ,z w ) can be expressed as:
[0084]
[0085] Among them, the rotation matrix R and the translation matrix T are respectively:
[0086]
[0087] T=[t x ,t y ,t z ] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More