

Point cloud data de-noising method and system
A point cloud data and data technology, applied in the field of computer vision, can solve the problems of low accuracy and large amount of calculation, and achieve the effect of improving efficiency and reducing the amount of calculated data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
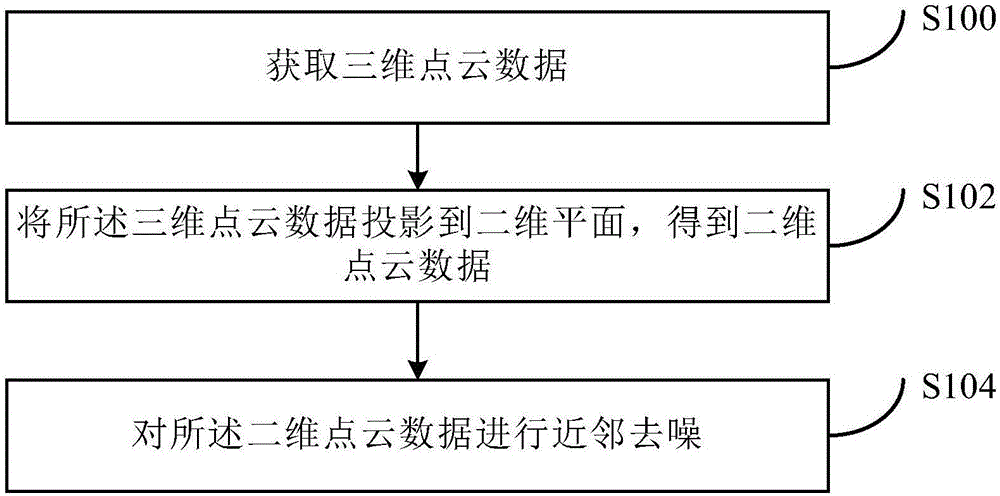
[0024] figure 1 A flow chart of steps of a method for denoising point cloud data according to Embodiment 1 of the present invention is shown.
[0025] refer to figure 1 , the method for point cloud data denoising of the present embodiment comprises the following steps:
[0026] Step S100, acquiring three-dimensional point cloud data.
[0027] In this step, the point data collection of the appearance surface of the scanned object obtained by the measuring instrument is called point cloud data, and the three-dimensional point cloud data is the point data collection of the appearance surface of the scanned object obtained by a three-dimensional image acquisition device such as a laser scanner. In this embodiment, the scanning object may be any object. The 3D point cloud data can be scattered 3D point cloud data, including 3D coordinate XYZ information, the X direction indicates the positive direction of the horizontal axis, the Y direction indicates the positive direction of t...
Embodiment 2
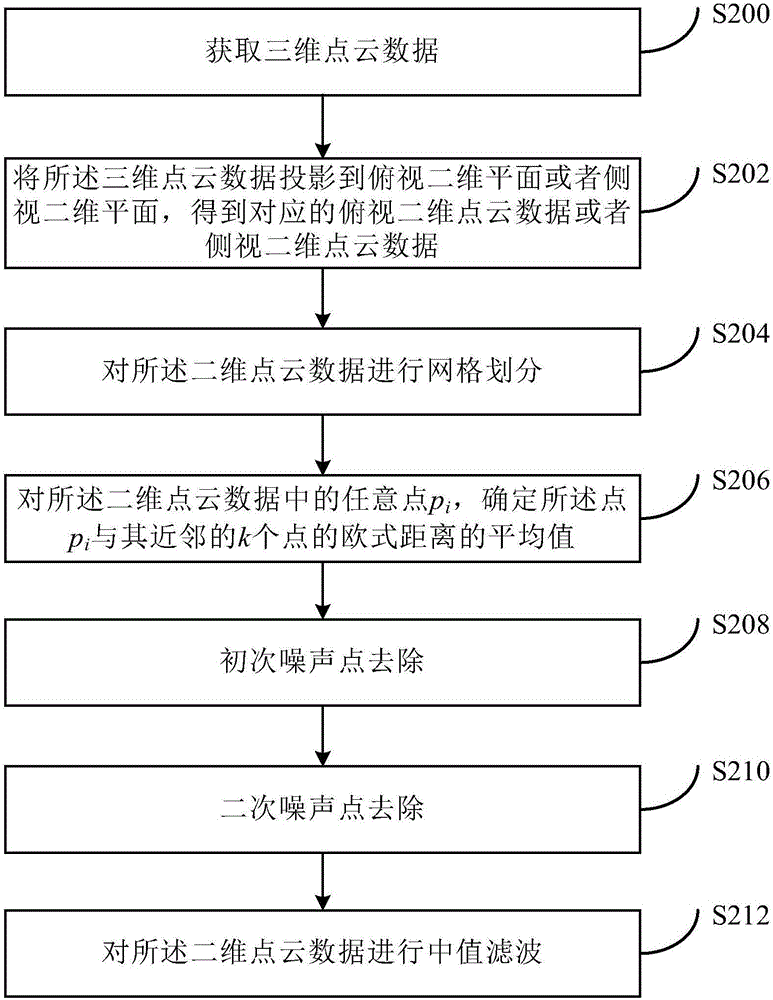
[0034] figure 2 A flow chart of steps of a method for denoising point cloud data according to Embodiment 2 of the present invention is shown.
[0035] refer to figure 2 , the method for point cloud data denoising of the present embodiment comprises the following steps:
[0036] Step S200, acquiring three-dimensional point cloud data.
[0037] Specifically, the three-dimensional point cloud data of the scanned object is acquired through an image acquisition device.
[0038] In this embodiment, the three-dimensional point cloud data of the scanned object is obtained by scanning, and the three-dimensional point cloud data includes data of multiple frames of the scanned object.
[0039] Step S202 , projecting the 3D point cloud data onto a top-view 2D plane or a side-view 2D plane to obtain corresponding top-view 2D point cloud data or side-view 2D point cloud data.
[0040] Considering that the obtained 3D point cloud data is the 3D coordinate information of points, the sca...
Embodiment 3
[0056] Figure 4 A structural block diagram of a system for denoising point cloud data according to Embodiment 3 of the present invention is shown.
[0057] The system for denoising point cloud data in this embodiment includes: an acquisition module 400 for acquiring three-dimensional point cloud data; a projection module 402 for projecting the three-dimensional point cloud data onto a two-dimensional plane to obtain a two-dimensional point cloud Data; a denoising module 404, configured to perform neighbor denoising on the two-dimensional point cloud data.
[0058] According to a system for denoising point cloud data provided by an embodiment of the present invention, by obtaining three-dimensional point cloud data; projecting the three-dimensional point cloud data onto a two-dimensional plane to obtain two-dimensional point cloud data; Denoising, after deleting the noise points in the 2D point cloud data, the noise points in the 3D point cloud data can be deleted. Therefore...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More