

Positioning device for welding robot and working system of welding robot
A welding robot and rectifier circuit technology, applied in welding equipment, auxiliary devices, auxiliary welding equipment, etc., can solve problems such as difficulty in meeting thick plate welding, robot position deviation, ineffective breakdown, etc., and improve fast response capabilities. , precise positioning, reducing the effect of delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
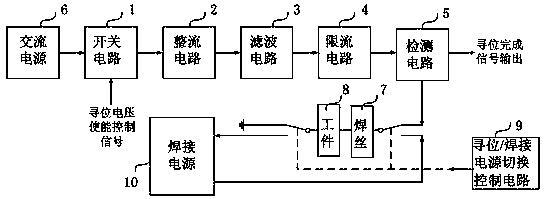
[0018] figure 1 A functional block diagram of a positioning device for a welding robot according to an embodiment of the present invention is shown. see figure 1 , according to an embodiment of the present invention, a positioning device for a welding robot includes a switch circuit 1 , a rectifier circuit 2 , a filter circuit 3 , a current limiting circuit 4 and a detection circuit 5 .
[0019] The input terminal of the switch circuit 1 is used to connect the AC power supply 6 , the output terminal of the switch circuit 1 is connected to the input terminal of the rectifier circuit 2 ; the switch circuit 1 is used to control the AC power supply 6 to be turned on or off. In this embodiment, the switch circuit is a relay, which can be controlled by an externally input seek voltage enabling signal DI. When the relay receives the enabling sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More