

Gesture-adjustable coordinate decoupling robot with seven degrees of freedom and control method
A degree of freedom, robot technology, applied in the field of robots, can solve the problems of difficult posture adjustment, large floor area occupation, large joint axis bending moment, etc., and achieves the effect of simple structure, convenient operation and control, and high reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
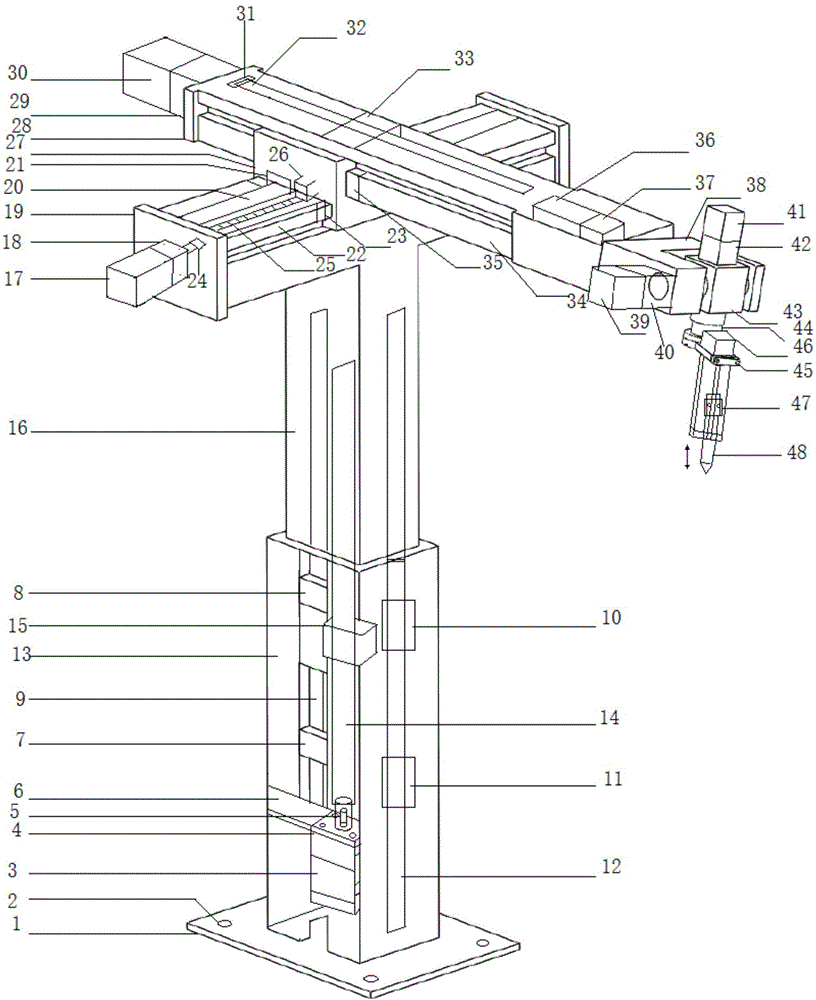
[0049] Such as figure 1 As shown, a seven-degree-of-freedom robot with adjustable attitude and coordinate decoupling includes: Z-axis vertical lift module, X-axis horizontal movement module, Y-axis horizontal movement module, attitude adjustment module and tool movement module, wherein:
[0050] The base mounting plate 1 in the Z-axis vertical lifting module is fixed on the ground reference or installed on other mobile platforms, and other components in the Z-axis vertical lifting module are insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More