

Method for optimizing inverse kinematic humanoid-arm configuration of 7-freedom-degree humanoid mechanical arm under multi-constraint condition
A technology of configuration optimization and inverse kinematics, which is applied to manipulators, program-controlled manipulators, and special data processing applications, etc., can solve the problem of inability to fully describe the available arm configuration and motion of humanoid manipulators under multi-constraint conditions. Easy to jump and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
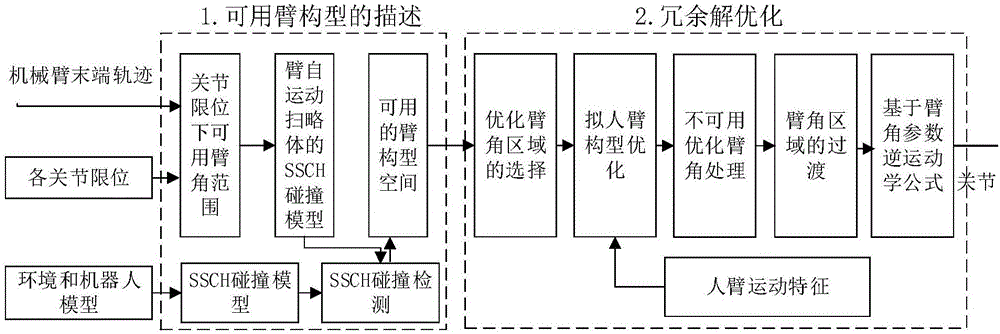
[0073] Embodiment one: combine below Figure 2 to Figure 7 This embodiment will be described in detail. The inverse kinematics anthropomorphic arm configuration optimization method for a seven-degree-of-freedom humanoid manipulator under multi-constraint conditions described in this embodiment includes an available arm configuration description part and an anthropomorphic arm configuration redundant solution optimization part;
[0074] Available arm configuration description sections include:
[0075] Step 1. Calculating the self-motion range of the humanoid manipulator that satisfies the joint limit condition according to the motion track of the end effector of the humanoid manipulator;
[0076] The specific process of this step is:
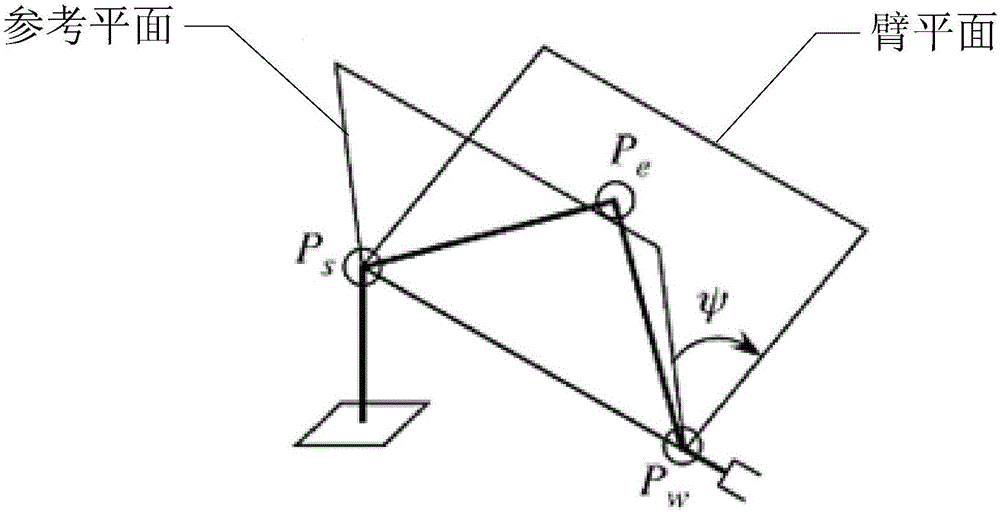
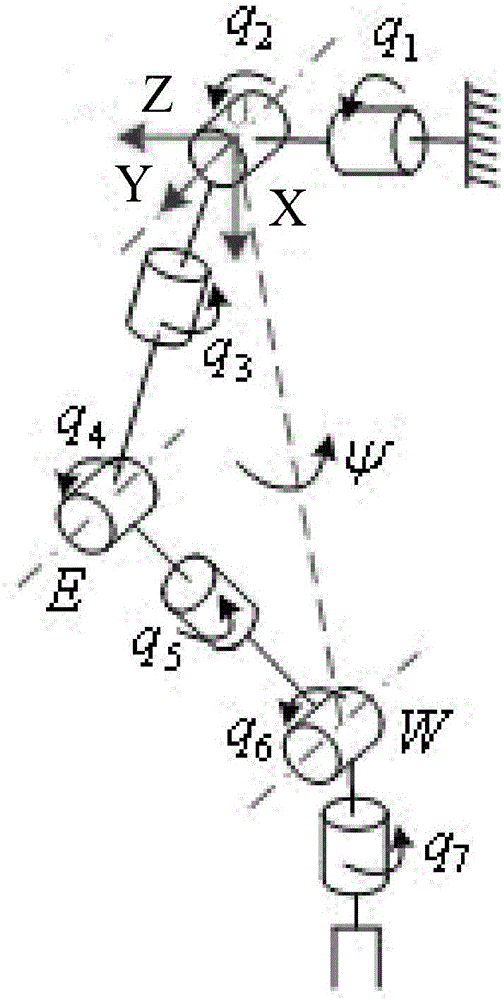
[0077] Establishing a three-dimensional base coordinate with the second joint as the coordinate origin, specifying the expected position and expected posture of the end effector of the humanoid manipulator relative to the three-dimensional bas...
Embodiment 2
[0213] Embodiment 2: This embodiment further limits the inverse kinematics anthropomorphic arm configuration optimization method for a seven-degree-of-freedom humanoid manipulator described in Embodiment 1.
[0214] According to the inverse kinematics anthropomorphic arm configuration optimization method of a seven-degree-of-freedom humanoid manipulator under multi-constraint conditions described in this embodiment, in step 6, the movement data of the volunteer’s arm in a complex environment collected in real time by the motion capture system and Use the least squares theory to determine the relationship between the human arm and the arm angle, and map the relationship to the optimal arm angle region of the humanoid manipulator to select the anthropomorphic arm configuration;
[0215] Or step six can also determine the anthropomorphic arm configuration in the optimized arm angle region according to the energy minimum principle.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More