

A self-checking and correcting system and method for a motor used in an exoskeleton robot
A technology of an exoskeleton robot and a correction method, which is applied in the estimation/correction of motor parameters, control systems, manipulators, etc., can solve problems such as failure to perform special correction in rehabilitation training mode and inability to perform real-time correction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
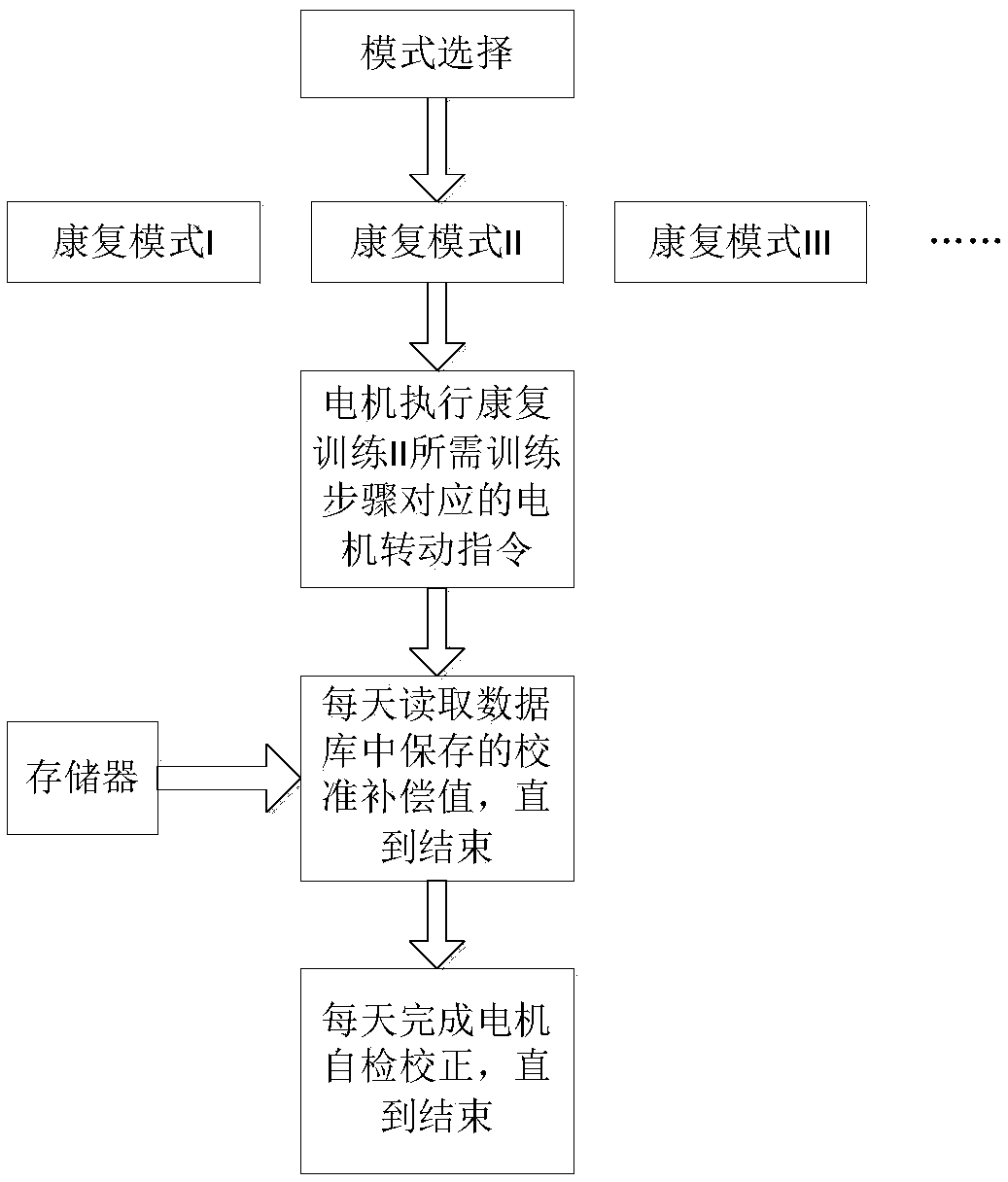
[0033] On the basis of the above technical solutions, a more efficient motor self-checking and correcting technical solution is provided, and this method can improve the correction efficiency on the basis of real-time correction. The exoskeleton robot provides a variety of rehabilitation training modes, which are customized for the rehabilitation or training purposes of different rehabilitation trainers, such as lower limb recovery training for long-term bedridden patients. Doctors formulate daily routines for such patients. Recovery actions, these daily recovery actions include the angle to help the limbs to rotate, the speed of rotation and the number of times to form a training course, as rehabilitation training mode I; the exoskeleton robot can also be used as a lower limb strength training machine for healthy people, for lower limbs For strength training needs, daily training actions can also be formulated; and these daily training actions form a training plan as rehabilit...
Embodiment 3
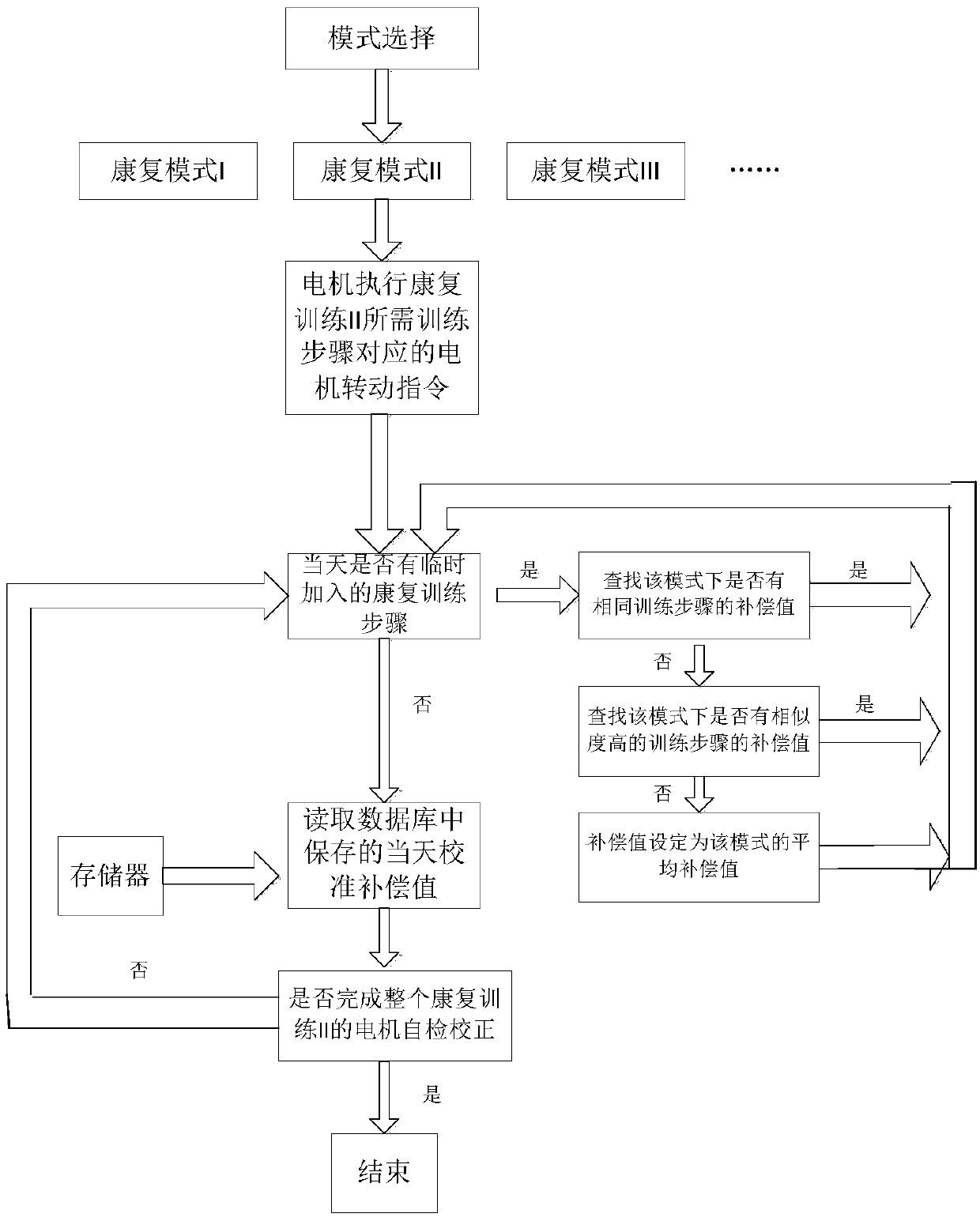
[0041] On the basis of the above technical solutions, another preferred motor self-checking and correcting technical solution is provided. Rehabilitation training is due to the individual differences of each user, and the recovery will be slow or fast. Therefore, if only one training plan is used for each trainer, the rehabilitation effect will inevitably be greatly reduced; Make changes. When the training plan is changed, it will affect the error-time calibration database already established in the above technical solution; therefore, for the training step added temporarily, a controller in the drive module first searches for the compensation value of the same training step in this mode; if If there is no same training step in this mode, then find the compensation value of the training step with high similarity; if there is no compensation value of the training step with high similarity, set the compensation value as the average compensation value of this mode. The training ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More