

Double-arm feeding and discharging manipulator
A manipulator and double-arm technology, applied in the field of manipulators, can solve the problems of low efficiency of loading and unloading, unloading and unloading of workpieces cannot be carried out at the same time, and can not realize 180° turning of thin plate and disc-shaped workpieces, etc., and achieve precise placement, movement guidance and reset. Smooth and efficient results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The double-arm loading and unloading manipulator of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
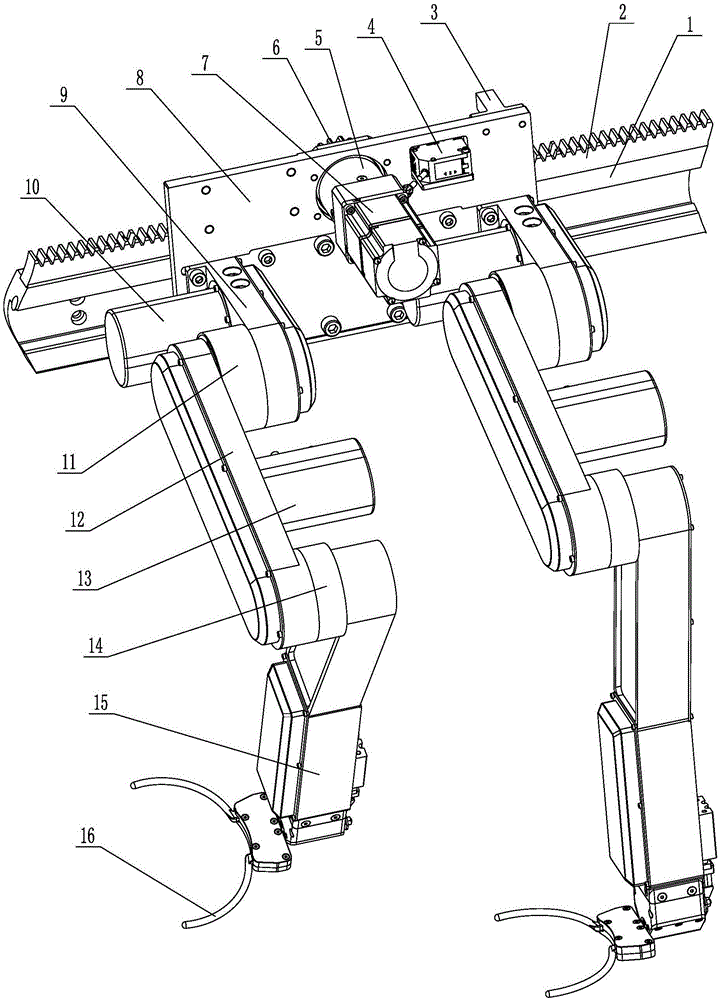
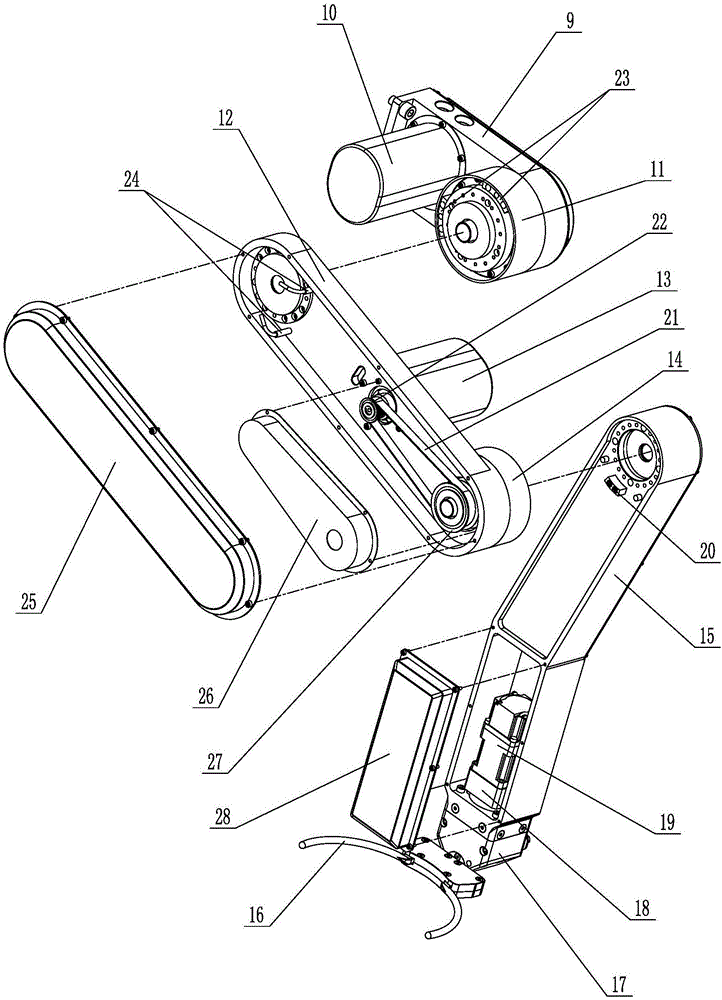
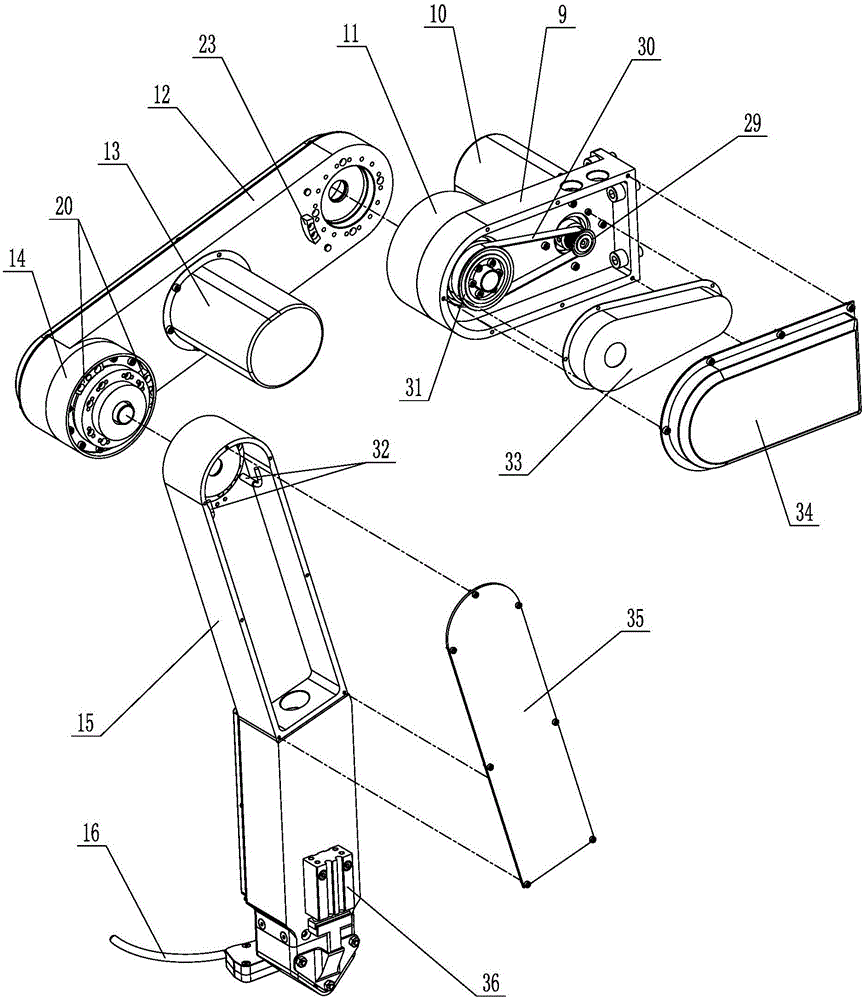
[0030] Such as Figure 1 to Figure 7As shown, the double-arm loading and unloading manipulator of the present invention includes a base 8, and two identical manipulators are arranged in parallel on the base 8, and each manipulator includes a fixed arm 9, a first rotating arm 12, a second rotating arm 15 and a connecting arm 9. On the mechanical claw on the second rotating arm 15, the first motor 10 and the first speed reducer 11 are installed on the fixed arm 9, and the motor shaft of the first motor 10 is connected with the first driving synchronous pulley 29, the first speed reducer The input shaft of 11 is connected with the first driven synchronous pulley 31, the first driving synchronous pulley 29 is connected with the first driven synchronous pulley 31 by the first synchronous belt 30, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More