

Kinematics modeling method for articulated robot
A technology of robot kinematics and modeling method, which is applied in the field of joint robot kinematics modeling, can solve the problems of excessive calculation and complexity, and achieve the effect of easy programming, easy to understand, and simple and clear derivation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
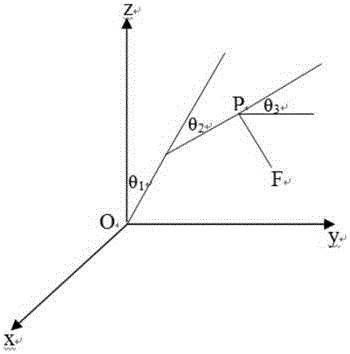
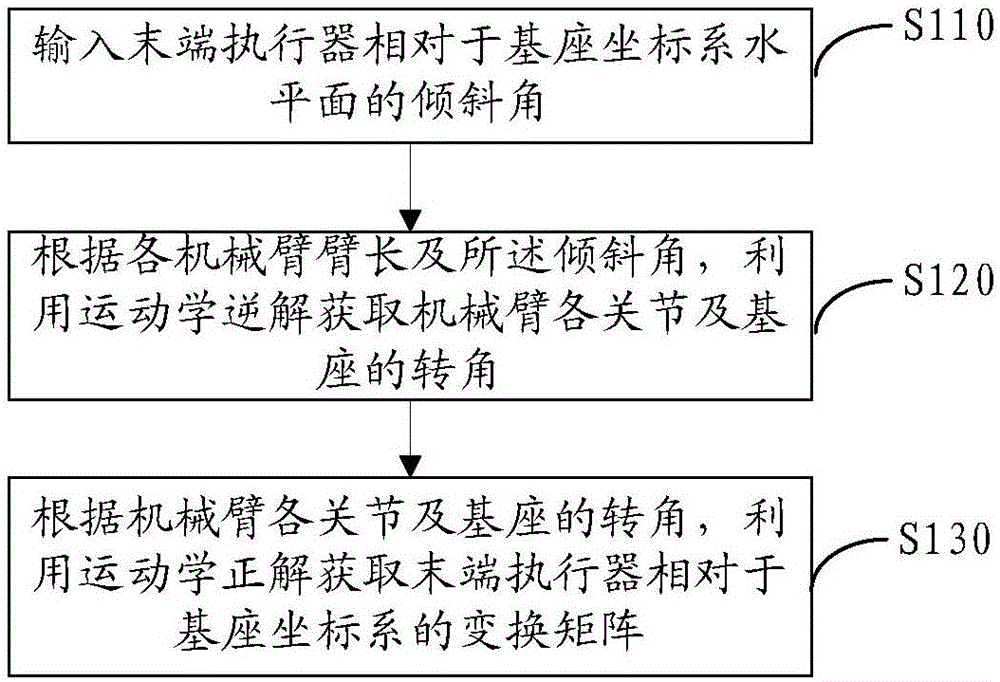
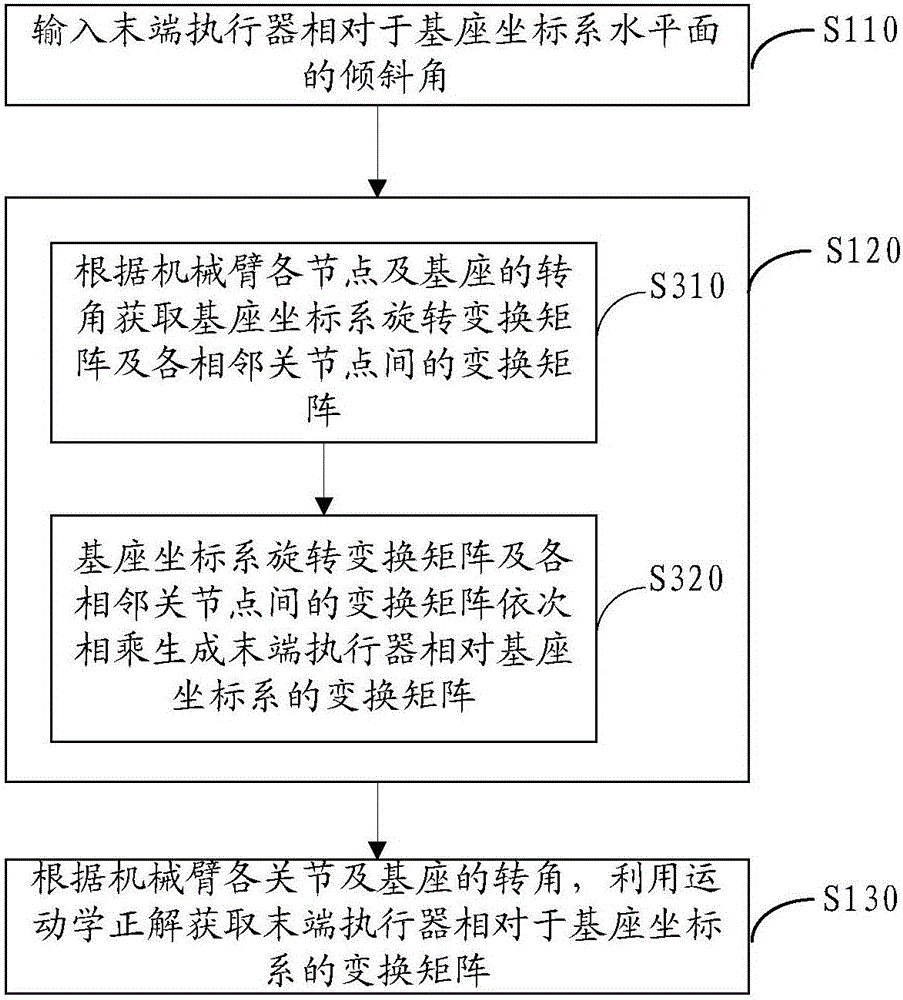
[0014] In the embodiment of the present invention, through the inclination angle of the end effector relative to the base coordinate horizontal plane and the length of the manipulator rod, the inverse kinematics solution is used to obtain the rotation angles of each joint of the manipulator and the base, and then the kinematics positive solution is used to obtain the relative position of the end effector. Based on the attitude and position of the base coordinate system, the derivation process of this modeling method is simple and clear, easy to understand, easy to program, and applicable to practice...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More