

Robot joint reducer
A technology of robot joints and reducers, which is applied in the field of robots, can solve the problems of flexible output transmission error and precision to be further improved, high precision requirements for rigid gear processing, and high difficulty in rigid gear processing, so as to achieve strong load bearing capacity and repeated positioning The effect of high precision and large number of teeth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
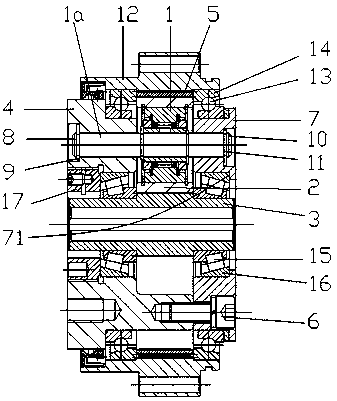
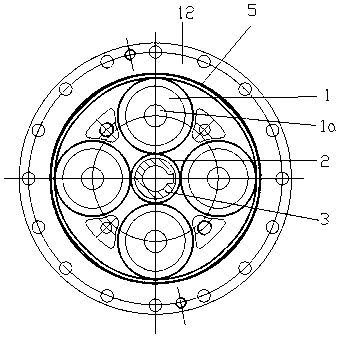
[0024] Example: see Figures 1 to 3 As shown, the robot joint reducer includes a planetary gear 1 and a sun gear 2 fixed on the power input shaft 3, the left box 4 and the right box 7 are fixed together by screws 6, and the left box 4 and the right box 7 are the same Axis line, the power input shaft 3 is coaxial with the left box body 4 and the right box body 7;
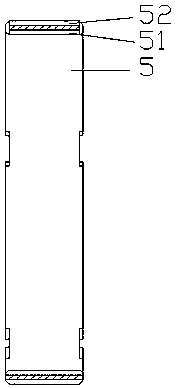
[0025] Internal teeth 51 are formed on the inner wall of the thin-walled elastic ring gear 5, and external teeth 52 are formed on the outer wall of the thin-walled elastic ring gear 5. The sun gear 2 meshes with the planetary gear 1, and the planetary gear 1 and the thin-walled elastic ring gear 5 The internal teeth 51 are meshed, and there are four planetary gears 1;
[0026] The planetary gear 1 is molded or fixed on the planetary gear shaft 1a, and the planetary gear shaft 1a is inserted into the preset holes of the left box body 4 and the right box body 7. The left end of the planetary gear shaft 1a is screwed w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More