

Altitude measurement control system and control method for unmanned aerial vehicles based on fault-tolerant processing
A technology of unmanned aerial vehicle and control system, which is applied in the field of height measurement control system and control of unmanned aerial vehicle based on fault-tolerant processing, which can solve problems such as increased equipment cost, fault failure, and complex algorithm, so as to achieve reliability and improve reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
[0039] An example of an unmanned aerial vehicle altitude measurement control system based on fault-tolerant processing technology provided by the embodiment of the present invention:
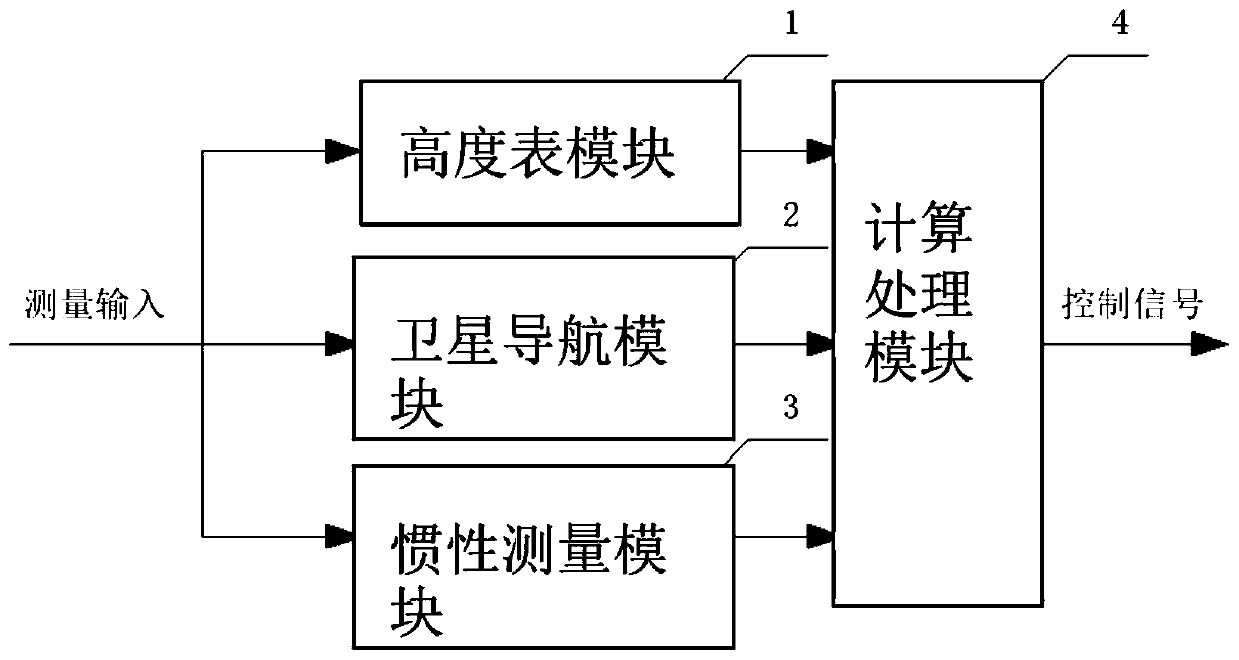
[0040] It mainly includes an altimeter module 1, a satellite navigation module 2, an inertial measurement module 3, and a calculation processing module 4;
[0041] The altimeter module 1 uses a radio altimeter to measure the distance of the aircraft to the ground in real time;
[0042] The satellite navigation module 2 adopts a GPS receiver, receives and processes satellite signals, and measures the flight position and direction of the UAV in real time;
[0043] Inertial measurement module 3, adopts AD company's low-cost MEMS inertial measurement unit ADIS16405 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More