

Autonomous navigation robot based on global wheel
A technology of autonomous navigation and robotics, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low operating efficiency, complex algorithms, and limited movement areas, so as to improve mobile flexibility and eliminate interference factors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
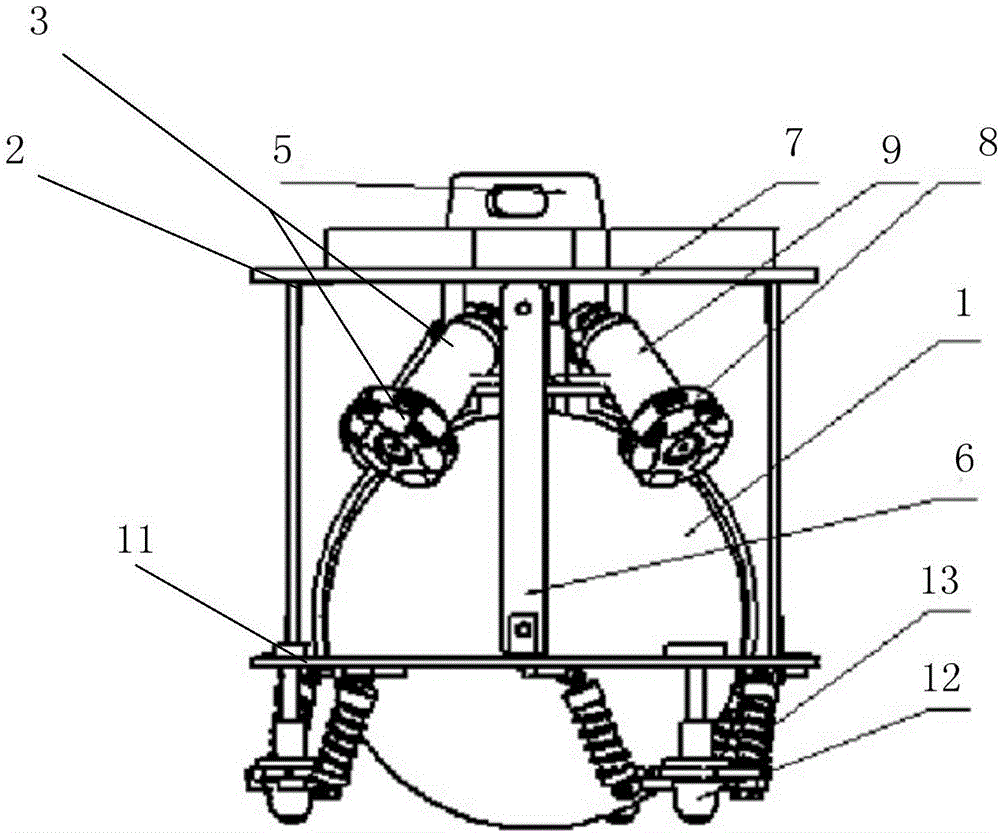
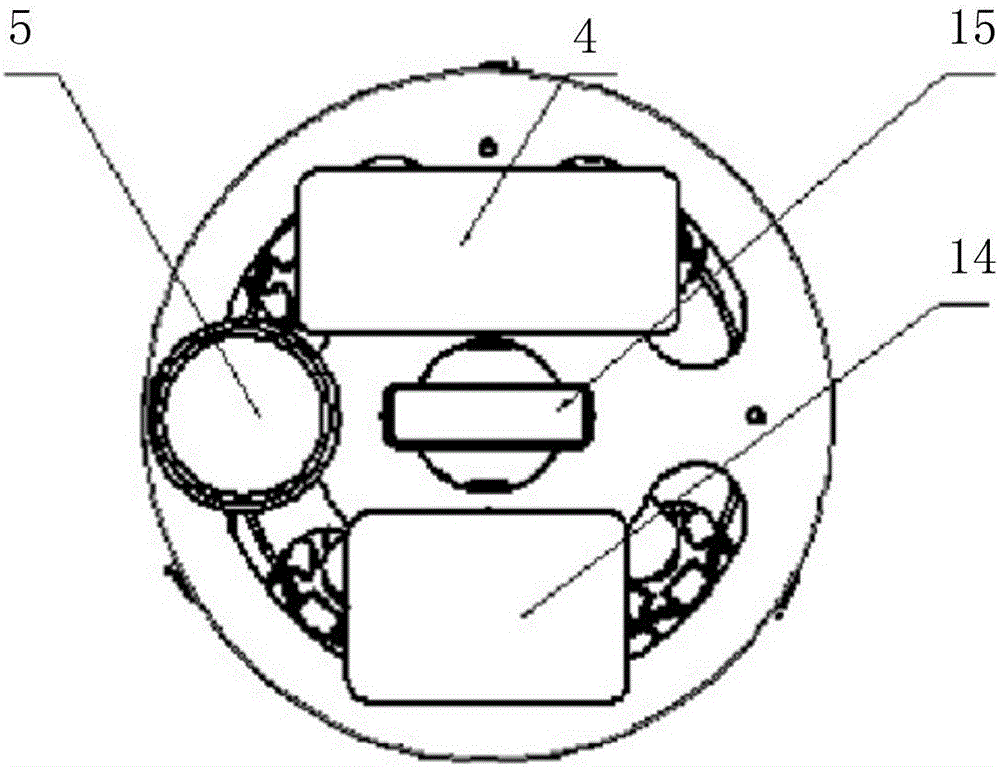
[0036] Such as figure 1 and 2 Shown, a kind of autonomous navigation robot based on spherical wheel of the embodiment of the present invention, described autonomous navigation robot based on spherical wheel comprises spherical tire 1, robot support 2, tire driving mechanism 3, master controller 4 and distance detector 5 , the robot support 2 includes a tire support 6 and a control platform 7, the tire support 6 is set on the outside of the spherical tire 1, the control platform 7 is arranged above the tire support 6, and the tire driving mechanism 3 includes At least three groups of driving wheels 8 and driving motors 9, the driving wheels 8 are respectively connected with the corresponding driving motors 10, the driving motors 10 are connected with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More