

Double-body detection underwater robot device and control method
An underwater robot and robot technology, applied in underwater ships, underwater operating equipment, manipulators, etc., can solve problems such as inability to complete submerged and ascending movements, difficulty in meeting different task needs, limited number of equipment and batteries, etc. , to achieve the effects of flexible propulsion control, long-lasting endurance, stability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
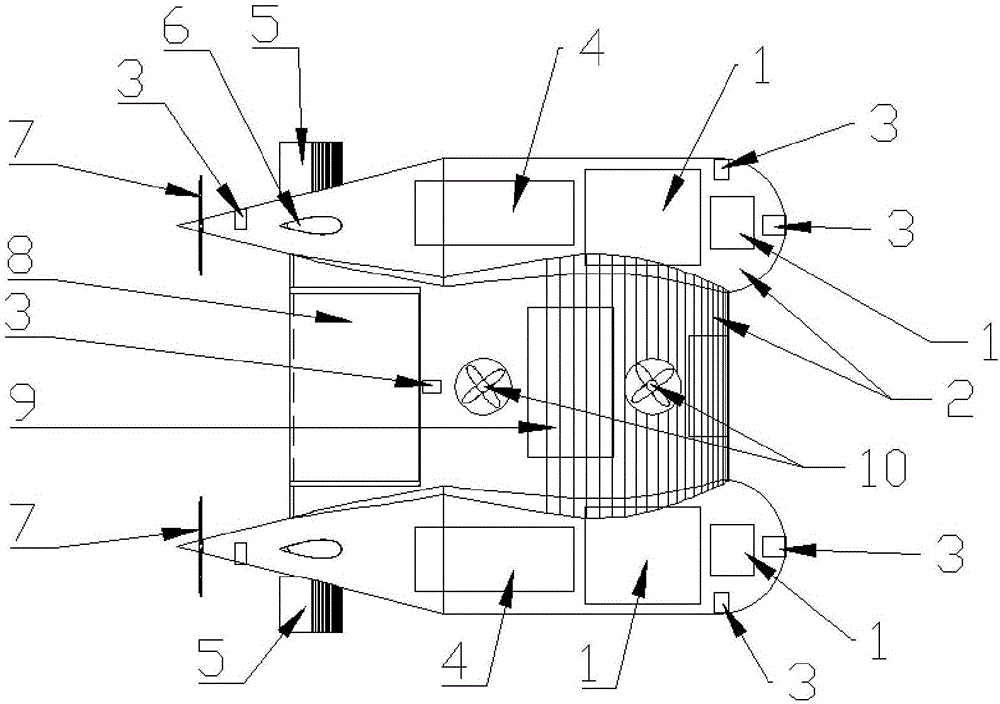
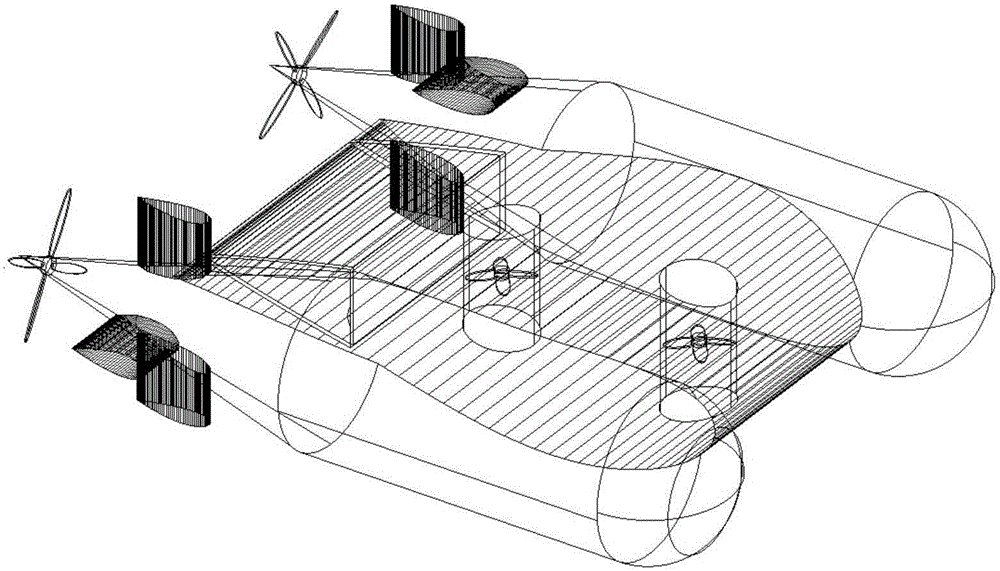
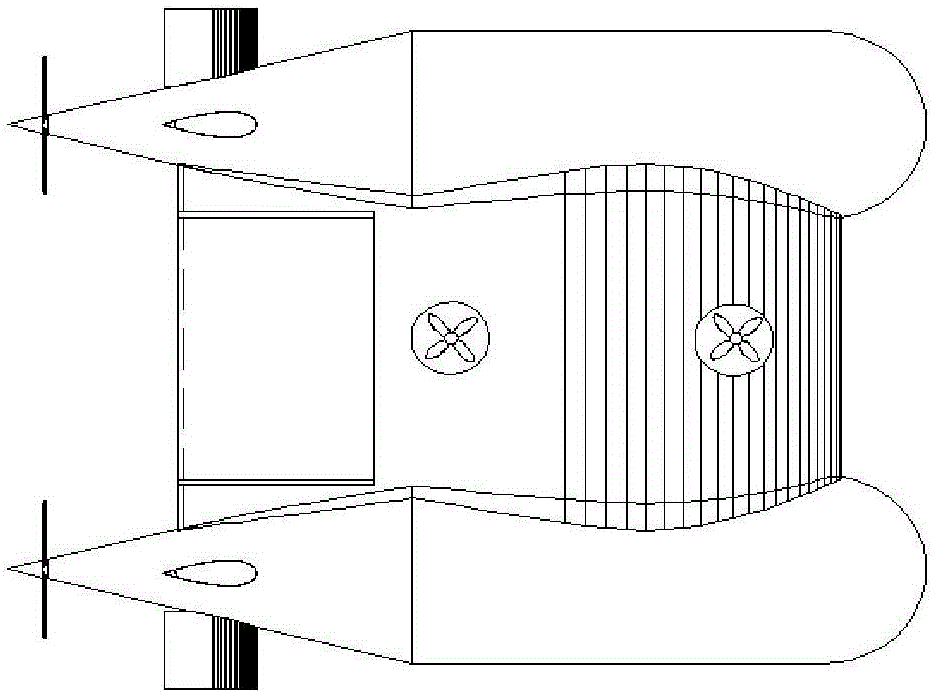
[0027] as attached figure 1 As shown, the present invention consists of a detection equipment cabin 1, a main body 2, a collision avoidance sonar 3, a battery cabin 4, a stabilizer wing 5, an airfoil vertical wing 6, a main pusher 7, an elevator 8, a core control cabin 9, and a vertical thruster 10 composition. The detection equipment cabin 1 adopts a modular design, which can satisfy the installation of different detection equipment, and there are watertight plugs of uniform size in the cabin, so that the equipment can be quickly connected to the robot, and has the characteristics of modularization and versatility. That is to say, the detection equipment compartment 1 can be equipped with required detection equipment according to different tasks, and has modularity and versatility. The underwater robot of the present invention adop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More