

Coordinated planning and control method of underwater mobile operation robot
A technology of mobile operation and control method, applied in the field of robotics, can solve the problems of insufficient autonomy and high technical requirements for operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
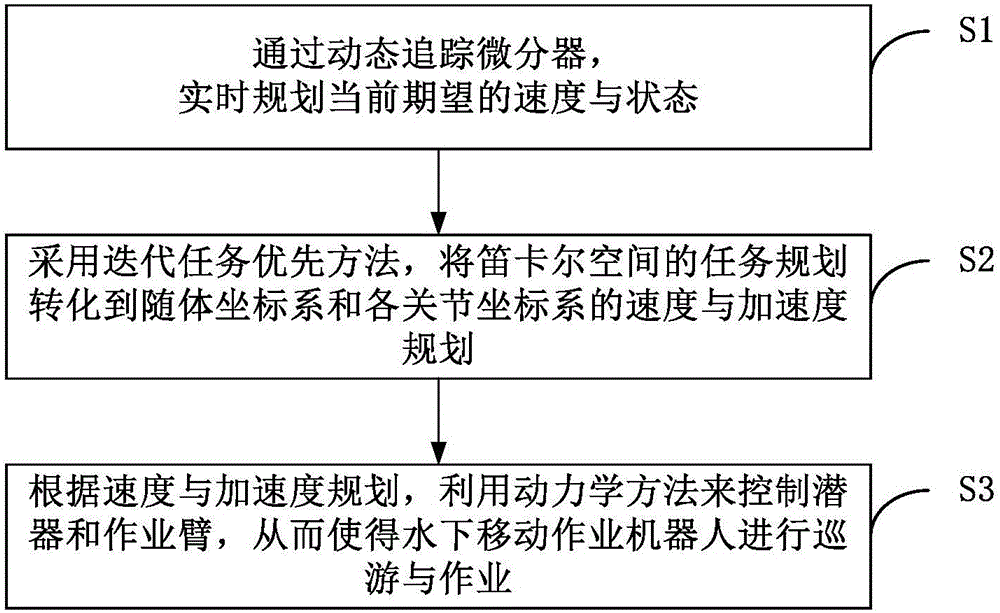
[0037] The basic concept of the embodiment of the present invention is to plan and control the aircraft hull and the robotic arm in a unified manner, fully consider the coupling effect between the hull and the robotic arm, divide the task of autonomous operation into several subtasks, and give priority to the subtasks Then, according to the order of priority, the control strategies and schemes of each subtask are fused in sequence, so as to complete each subtask and realize the final job task.
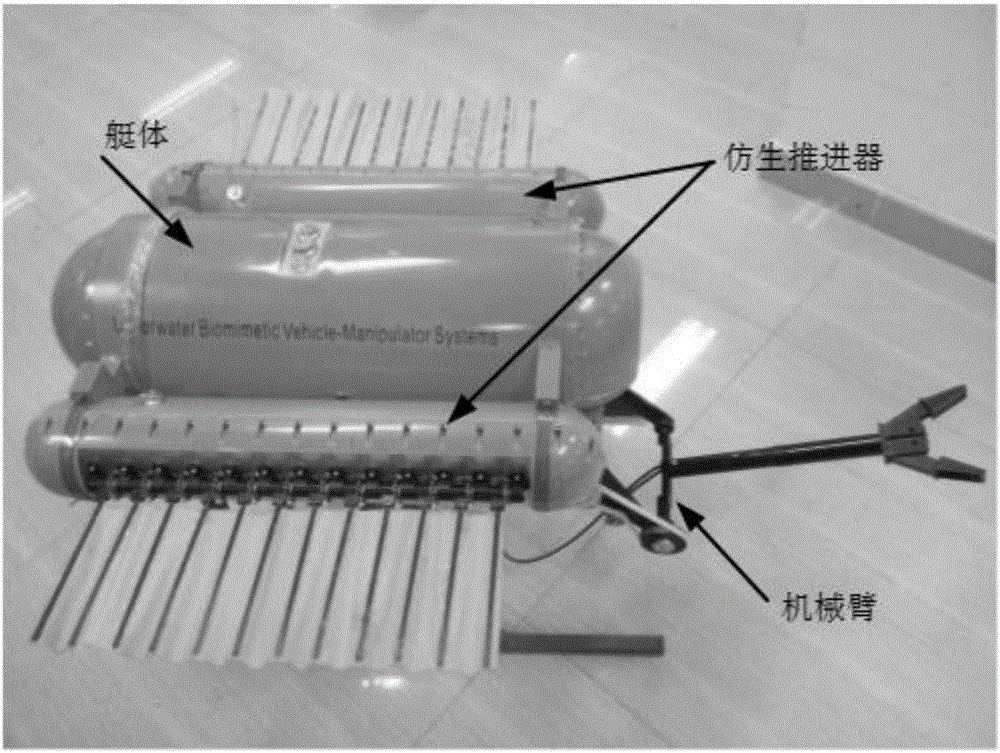
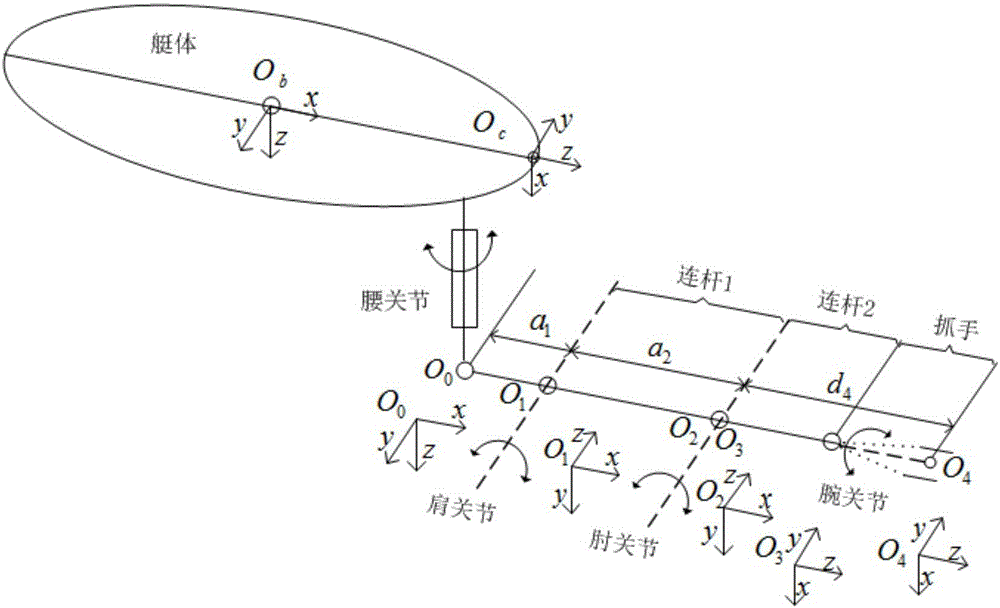
[0038] figure 1 It is an underwater mobile robot operating arm system, which is mainly composed of three parts: a bionic thruster assembled symmetric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More