

Adaptive hardware PID controller for controlling motor and control method of adaptive hardware PID controller
A controller and self-adaptive technology, applied in the direction of general control strategies, control systems, electrical components, etc., can solve problems such as low flexibility, consumption of software resources, and inability to precisely control motors, and achieve a wide range of applications, saving software resources, The effect of reducing the circuit size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure, and to fully convey the scope of the present disclosure to those skilled in the art.
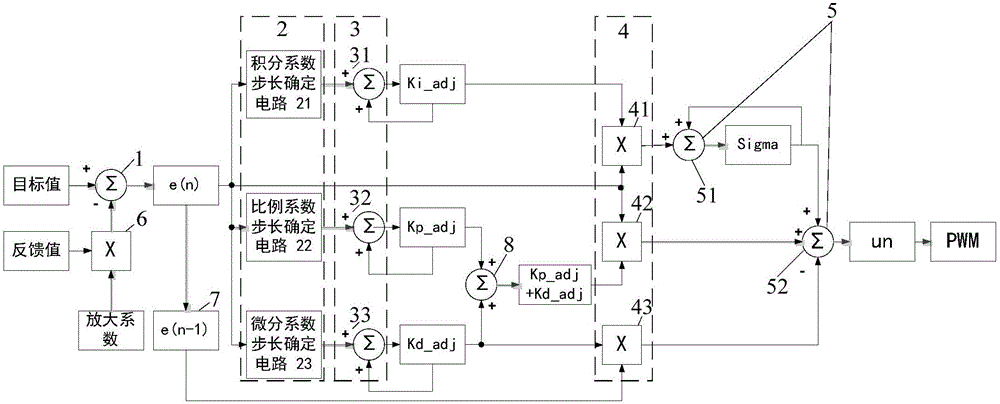
[0042] like figure 1 As shown, the hardware adaptive PID controller according to an embodiment of the present invention includes a first adder 1 for making a difference between the target value and the measured value to obtain the error e(n). Preferably, the measured value is obtained by multiplying the feedback value and the amplification factor input to the first multiplier 6 . Wherein, the target value may be the preset speed,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More