

Driver signal analysis method for electric drive track vehicle control
A technology of analysis method and control method, which is applied in the field of electric drive crawler vehicle control, can solve the problems of difficult balance between system power supply and power consumption, unknown drive motor power, and uncontrolled drive motor output power, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
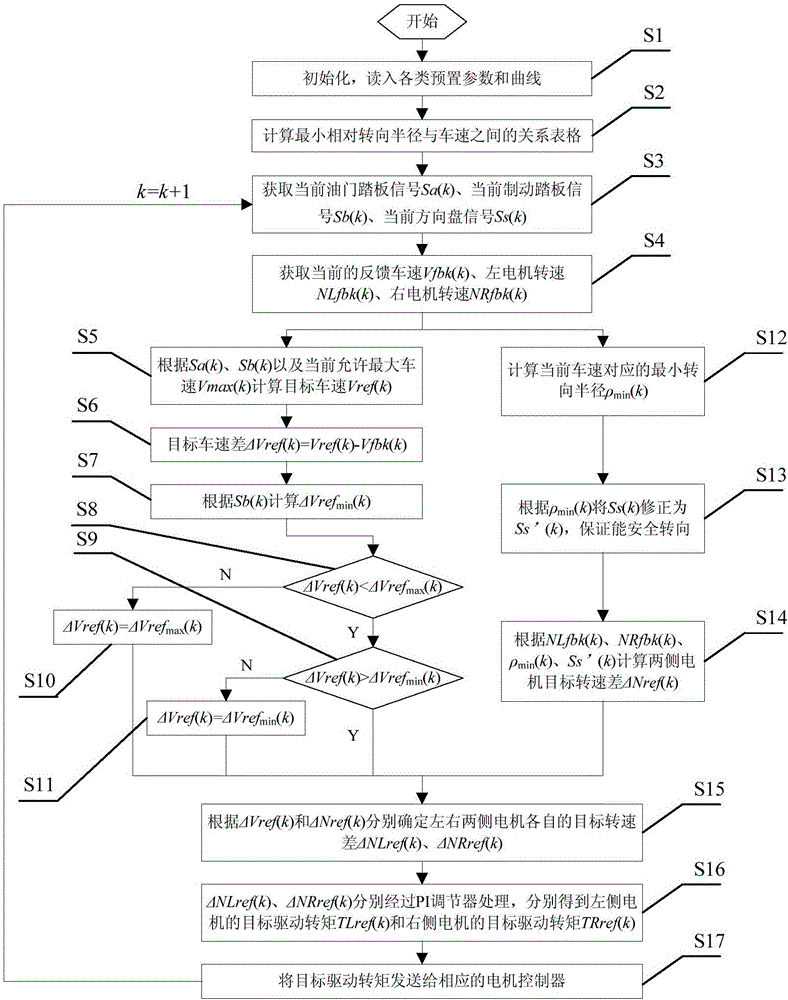
[0077] This embodiment is applicable to the situation where the motor control is in the torque mode, and the driver signal analysis method includes the following steps:
[0078] Described driver's signal analysis method comprises the steps:
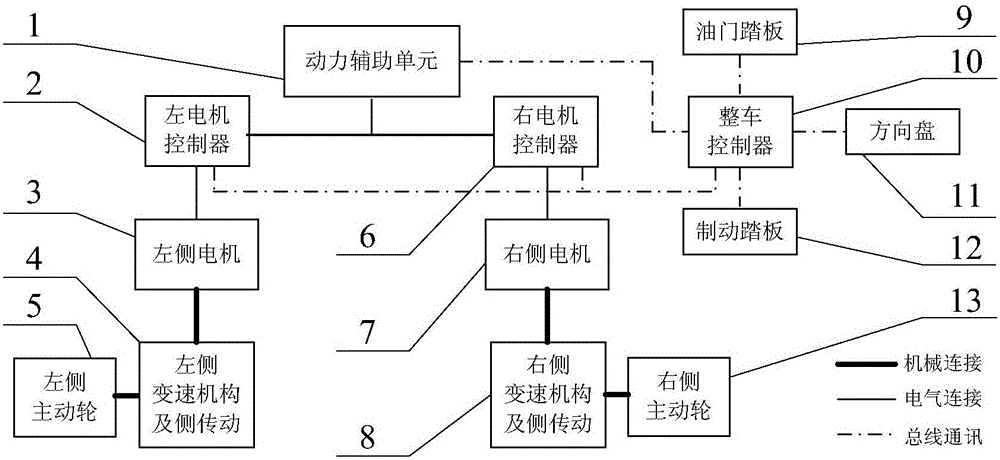
[0079] Step S1: The vehicle controller 10 initializes, and reads the parameters including road running resistance coefficient f, maximum steering resistance coefficient μ max , road surface adhesion coefficient Transmission ratio i b , side transmission ratio i c , vehicle center distance B, vehicle length L, vehicle weight m, driving wheel radius r, and read in the preset parameters of the vehicle including the maximum allowable vehicle speed Vmax and the maximum value of the increase rate ΔVref max In the preset control parameters, read in the discretization curve of the inherent steering safety factor δ changing with the vehicle speed V, and read in the inherent T-n characteristic curves of the motors on both sides; then go to step...
Embodiment 2
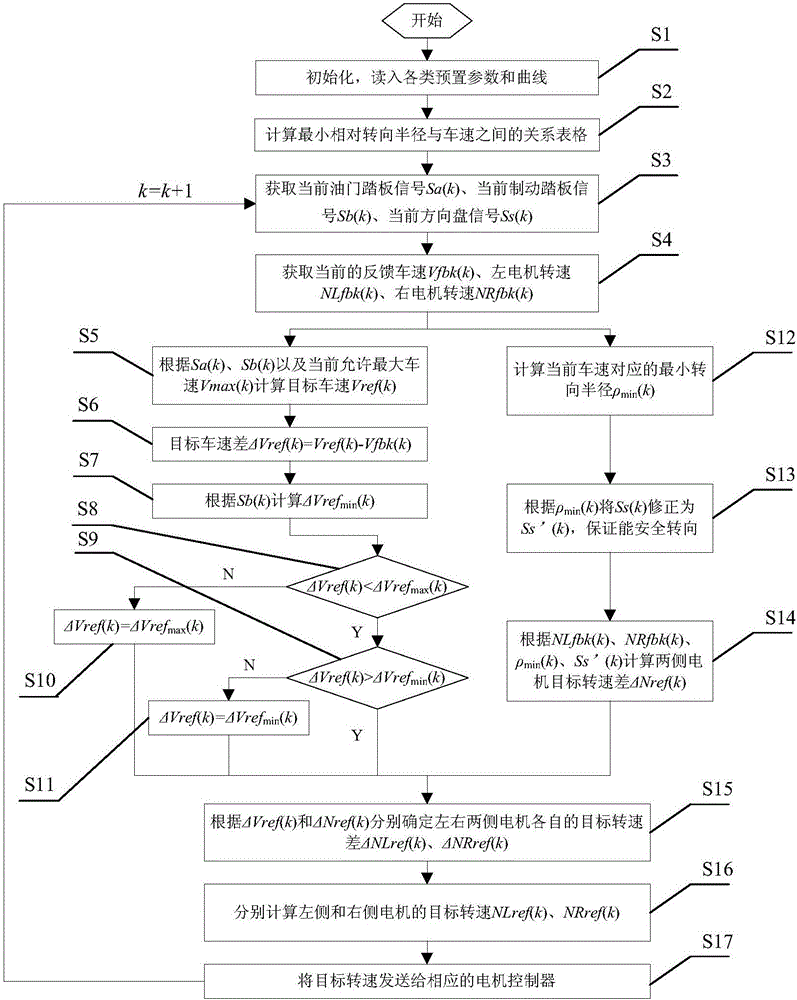
[0122] This embodiment is applicable to the case where the motor control is in the rotational speed mode, and the driver signal analysis method from step S1 to step S15 is the same as that in embodiment 1, the difference is that:
[0123] Step S16: According to the target speed difference ΔNLref(k) of the left motor, the target speed difference ΔNRref(k) of the right motor obtained in the previous step, the feedback speed NLfbk(k) of the left motor, and the feedback speed NRfbk of the right motor (k), respectively calculate the target speed NLref(k) of the left motor and the target speed NRref(k) of the right motor:
[0124]
[0125] Step S17: Send the target speeds of the motors on both sides to the corresponding motor controllers, and control the motors on both sides to output corresponding speeds, so that the vehicle can complete the direct driving or steering function. Jump to step S3 to perform real-time control within the k+1 control period.
[0126] In summary, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More