

Underwater glider navigation system and high-precision attitude estimation method
A technology for underwater gliders and navigation systems, which is applied in directions such as navigation through speed/acceleration measurement, can solve the problems of increased measurement errors of MEMS devices, reduced navigation solution accuracy and reliability, etc., to improve computing and shorten system integration. Time, effect of simplified inertial coordinate system alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
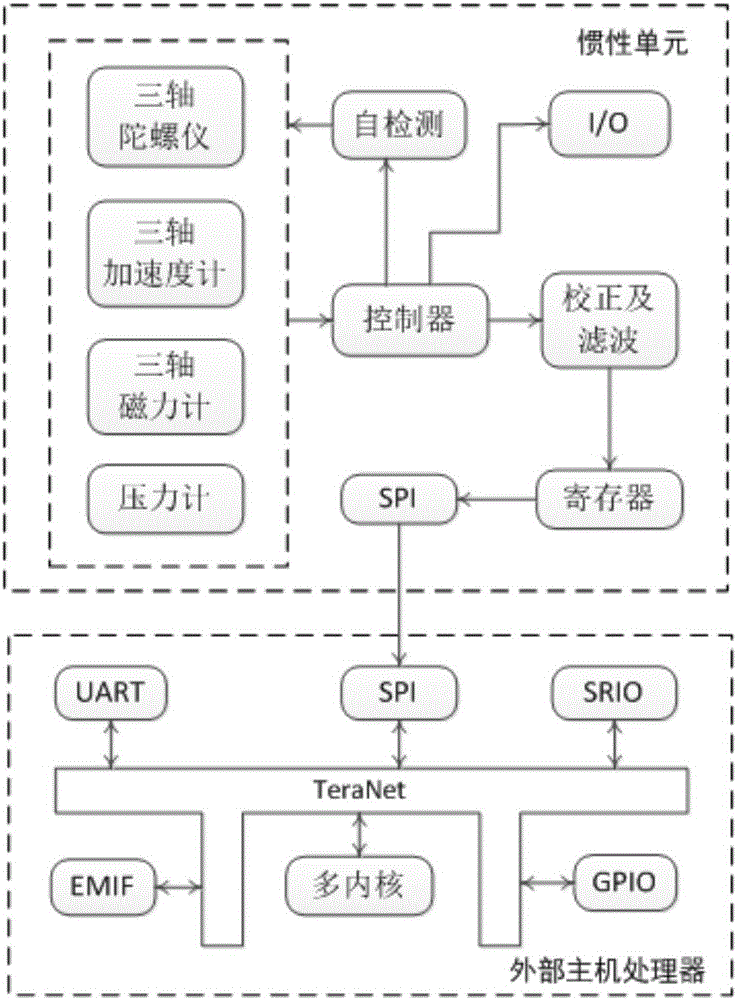
[0054] Such as figure 1 As shown, the underwater glider navigation system includes an inertial unit and an external host processor, and the inertial unit includes a controller, a three-axis gyroscope, a three-axis accelerometer, a three-axis magnetometer, a pressure sensor, a sensor processing unit, a register, SPI port and I / O port, the three-axis gyroscope, three-axis accelerometer, three-axis magnetometer, and pressure sensor are used to collect gyro bias, linear acceleration, sensitivity, and alignment information, and transmit the information to the controller , the output signal of the controller is stored in the register after being processed by the sensor processing unit, and the register is connected with the external host processor through the SPI port.
[0055] The registers include control registers and output data registers, the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More