

Predictive interpolation algorithm for high-speed and high-precision parameter curve
A technology of parameter curves and interpolation algorithms, applied in computer control, instruments, simulators, etc., can solve problems affecting real-time performance, many iterations, and large errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
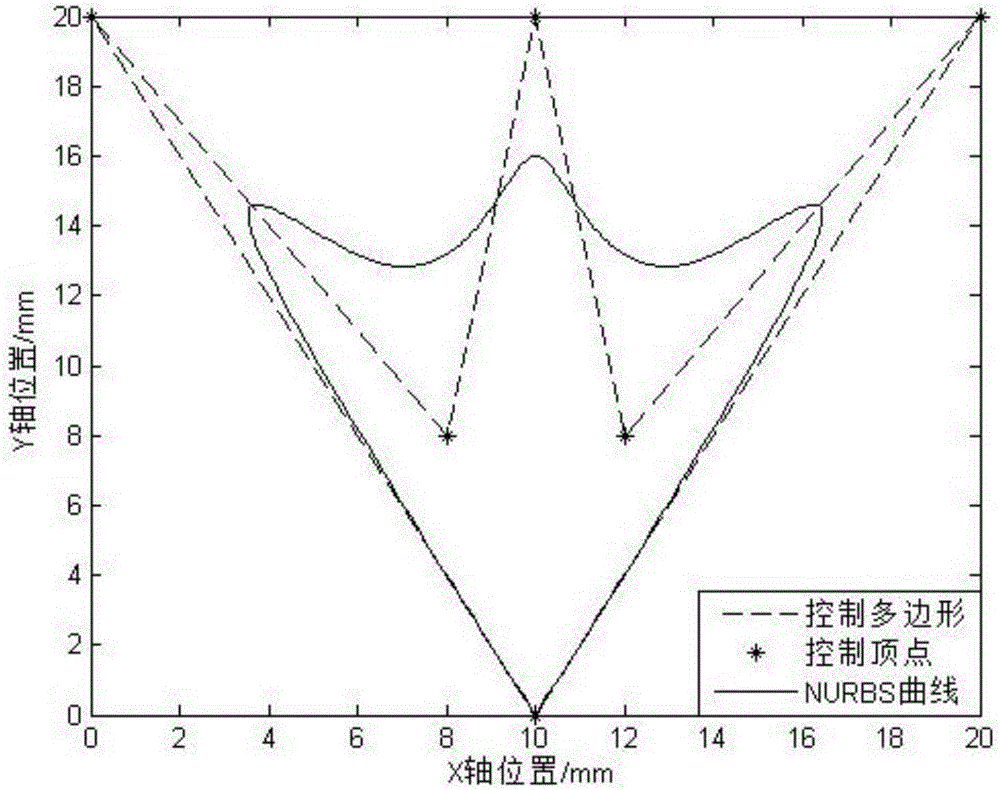
[0063] This embodiment uses NURBS cubic curve interpolation to introduce a high-speed and high-precision parameter curve forward-looking interpolation algorithm in detail.
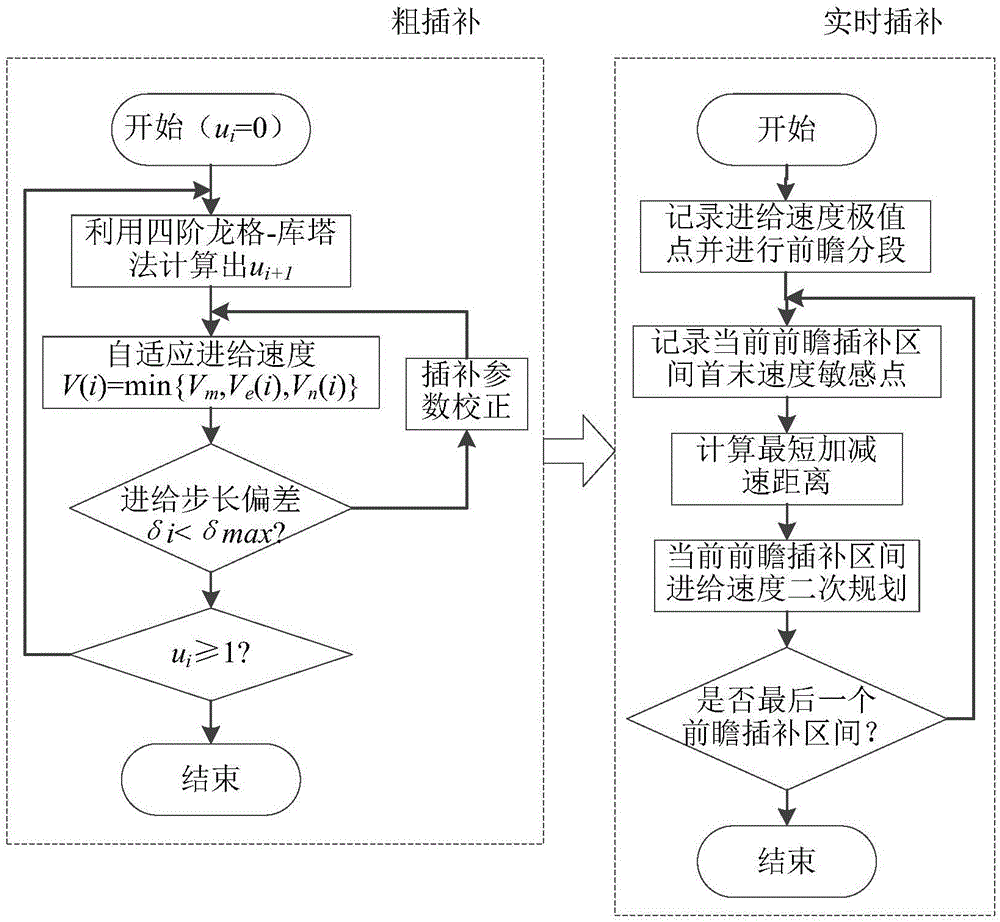
[0064] In this embodiment, the flow chart of the algorithm is as follows figure 1 Shown, the method provided according to the present invention comprises the steps:
[0065] S1, using the Runge-Kutta method to calculate the parameter value of each interpolation point of the parameter curve;
[0066] In the specific embodiment, the parameter value of each interpolation point of the parameter curve is calculated by the fourth-order Runge-Kutta method, and the specific formula is as follows:
[0067]
[0068] K 1 =V / C'(u i ), K 2 =V / C'(u i +K 1 T / 2), K 3 =V / C'(u i +K 2 T / 2),
[0069]
[0070] Among them, u i is the current interpolation point C(u i ) corresponds to the interpolation parameters, T is the interpolation period, and V is the given feed speed.
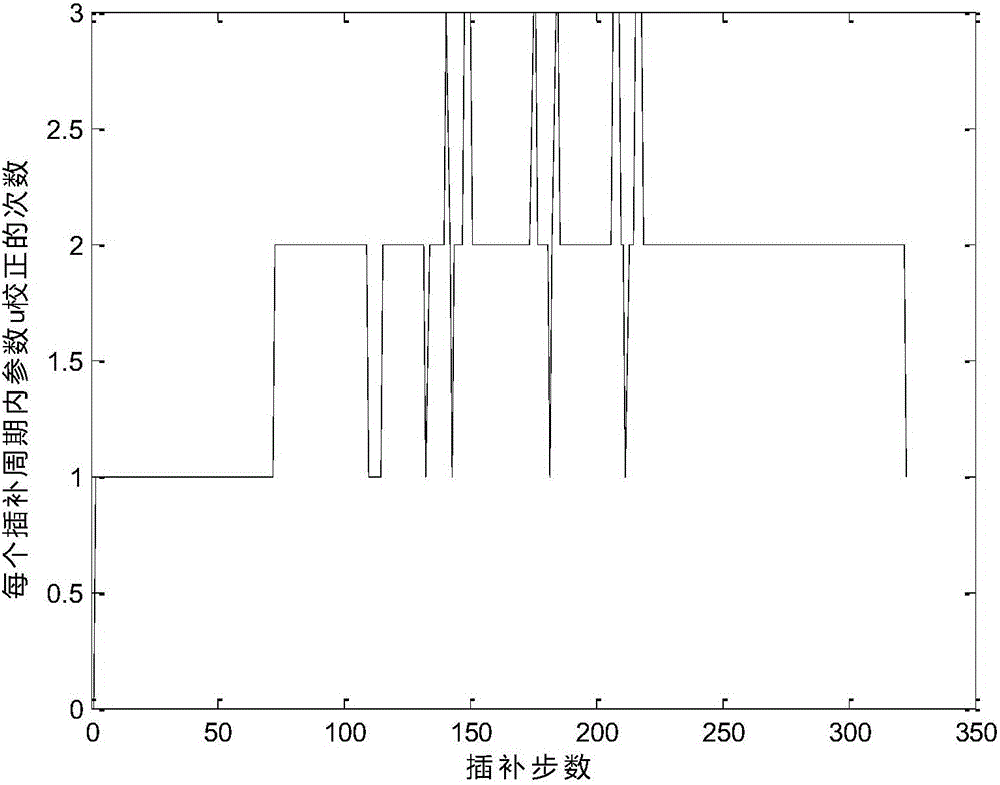
[0071] S2. Adaptively adjust the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More