

Floor mopping robot controlling dust suction power by virtue of image and control method
A technology of sweeping robots and image control, applied in the field of sweeping robots, can solve the problems of high cost, lack of recognition function, complex system, etc., and achieve the effect of prolonging service life, prolonging battery life and reducing working noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
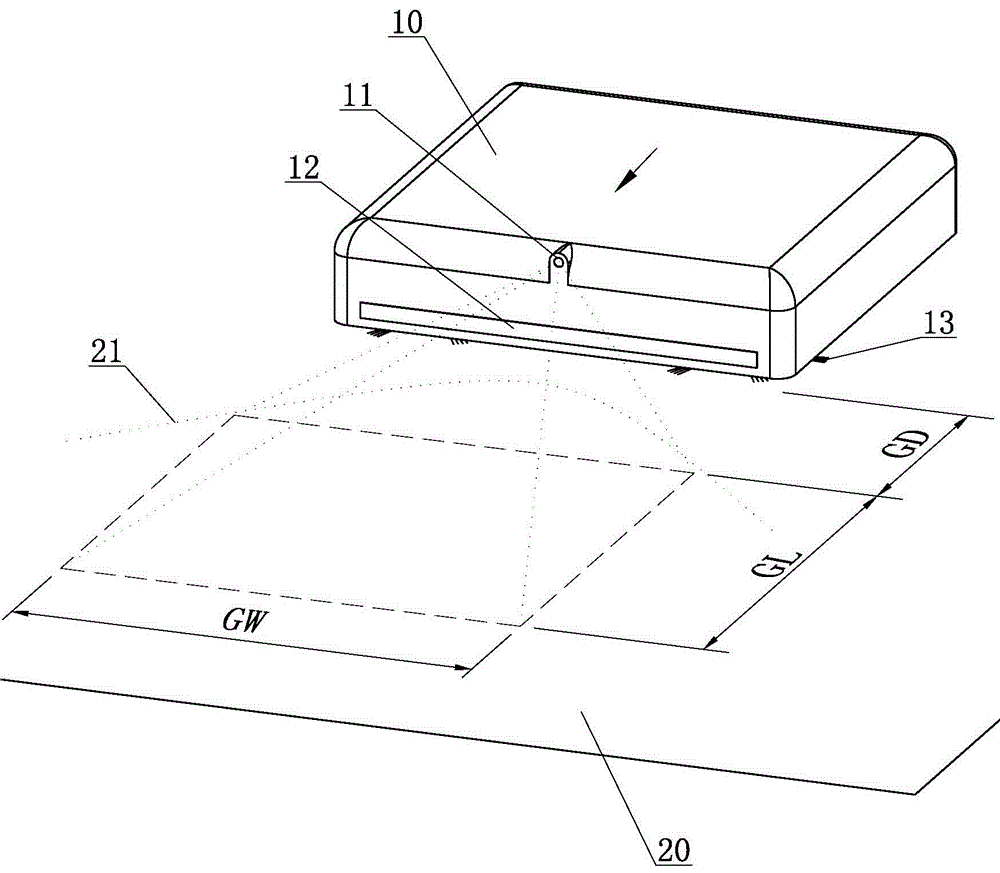
[0053] like figure 1 , figure 2 , an image-controlled vacuuming power sweeping robot 10, the sweeping robot walks on the working surface 20 and uses the vacuuming method to clean the working surface. The sweeping robot is provided with a vacuuming motor (not shown in the figure), and the vacuum cleaner motor can A motor that regulates the output power. The cleaning robot is also provided with a controller (not shown in the figure) that controls the output power of the vacuuming motor. In this embodiment, the width of the sweeping robot is 300 mm, and the length of the sweeping robot is 300 mm. A floor brush 13 is provided on the bottom surface of the cleaning robot. The cleaning width of the sweeping robot is the same as that of the sweeping robot.
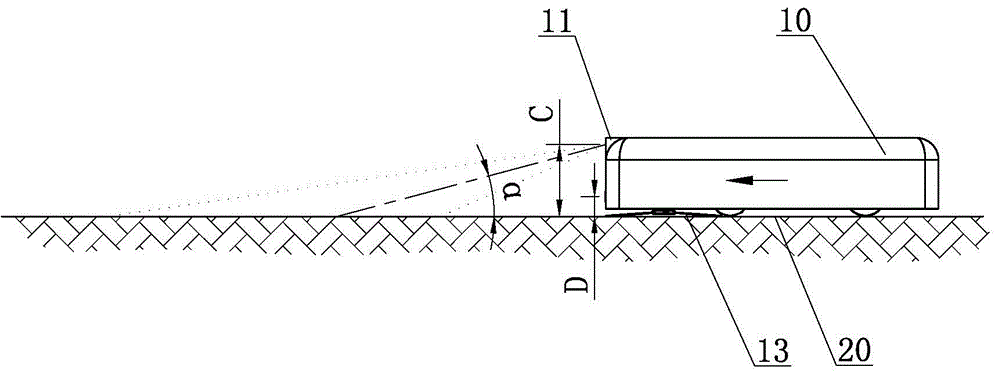
[0054] There is a camera 11 at the front of the sweeping robot. In order to enable the camera to clearly obtain the image of the working surface and the image of the dust in front of the robot, the height of the camera from ...
Embodiment 2
[0057] A control method of an image-controlled vacuuming power sweeping robot, wherein the sweeping robot is the image-controlled vacuuming power sweeping robot 10 described in the first embodiment.
[0058] The sweeping robot walks on the working surface and cleans the working surface by vacuuming. The sweeping robot is provided with a camera 11, and the sweeping robot is also provided with a controller that controls the output power of the vacuuming motor; the control method includes:
[0059] Step 1: The cleaning robot acquires the image of the clean state of the work surface, and stores it in the controller as a clean reference image.
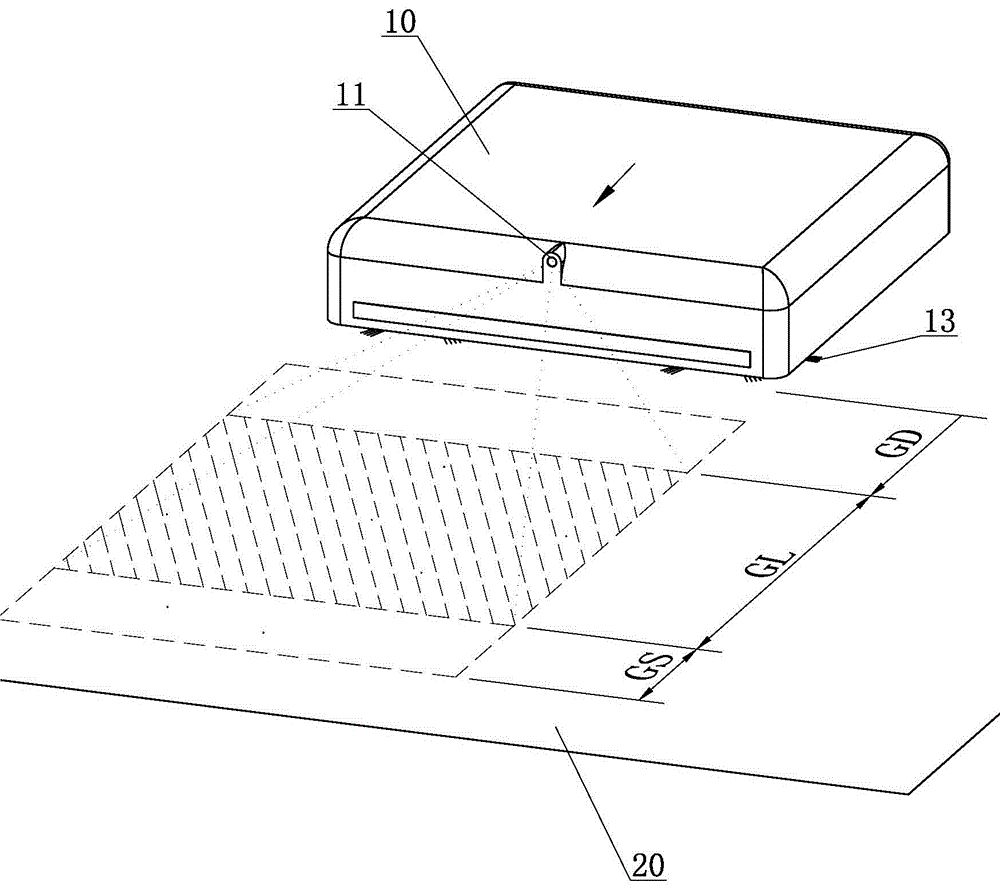
[0060] In this embodiment, the width of the work surface in the clean reference image is GW=300mm, which is equal to the width of the sweeping robot, the length of the work surface in the clean reference image is GL=300mm, and the work surface in the clean reference image is a square area, such as figure 1 shown. A clean reference image is...
Embodiment 3
[0075] This embodiment is another application example of the second embodiment.
[0076] like Figure 7 , the working face in this embodiment is the working face with the middle tone. The clean reference image has a width of 300mm, a height of 78mm, a width of 850 pixels, a height of 221 pixels, and a resolution of 72DPI.
[0077] The control method of this embodiment includes:
[0078] In step one:
[0079] The controller obtains the white reference threshold and the black reference threshold of the clean reference image, and the threshold value ranges from 0 to 255. The method of obtaining the white reference threshold is to perform binarization processing on the clean reference image to obtain the maximum white threshold value. Using the trial calculation method, with a 4-bit step value, when the threshold value is 92, the black in the binarized image will be black. The number of pixels is 0; when the threshold is 96, the number of black pixels in the binarized image is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More