

Unmanned aerial vehicle formation method based on small bird cluster flight mechanism
A technology for unmanned aerial vehicles and birds, which is applied in non-electric variable control, control/regulation system, three-dimensional position/channel control, etc. It can solve the problems that the stability of formation and the convergence of motion state are difficult to be guaranteed, and there is no unity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
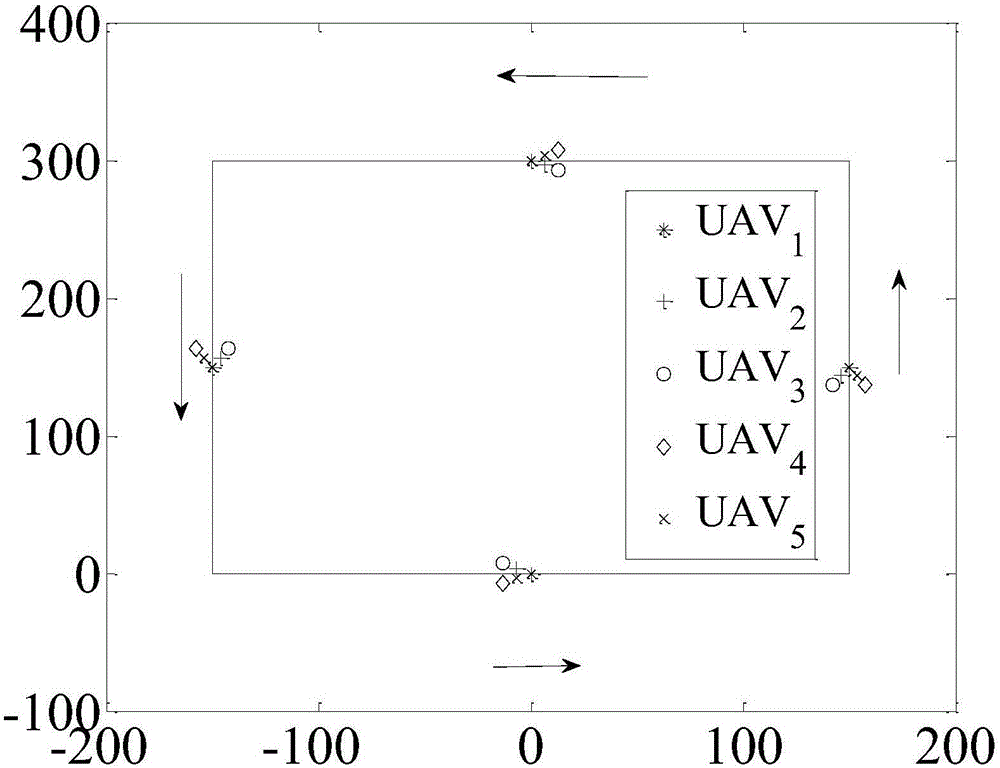
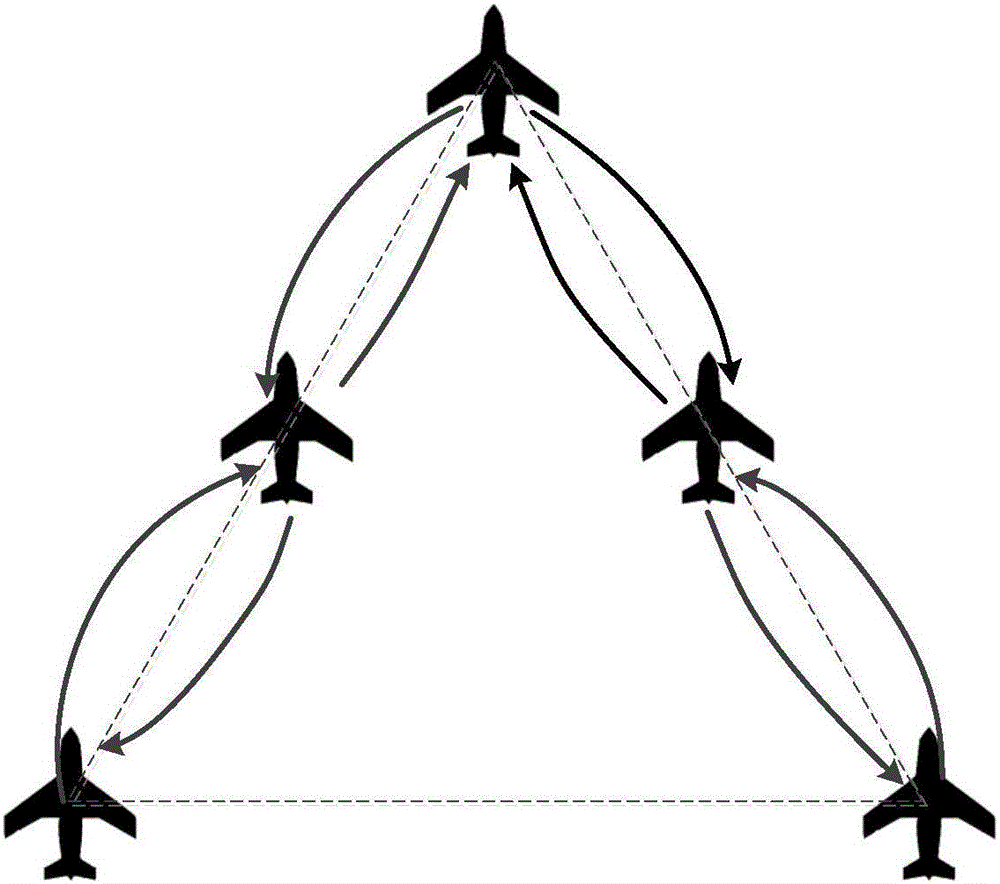
[0064] The effectiveness of the design method proposed by the present invention is verified below through a specific example. Five UAV formations perform patrol missions, and circle around a square area of 300m×300m counterclockwise. The schematic diagram of the mission is attached figure 2 shown. Each drone carries a small-range detection device, which can detect a circular area with a radius of 20 meters centered on its own position. Therefore, as long as one drone in the formation is less than 20 meters away from a certain path point, it is considered to have passed the path. point without strictly flying over it. The formation configuration is an inverted V shape, the sharp corner points to the flight direction, the top angle is 30 degrees, and the distance between adjacent drones is 3.75 meters. The schematic diagram of the configuration is attached image 3 shown. Considering the actual performance of the UAV, its maximum flight speed is limited within 5 m / s. The e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More