

Multi-mode interactive method and system related to application program of intelligent robot
A technology of intelligent robots and applications, applied in the field of intelligent robots, can solve problems such as reducing user experience, mismatching intentions, poor intelligence and anthropomorphism, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
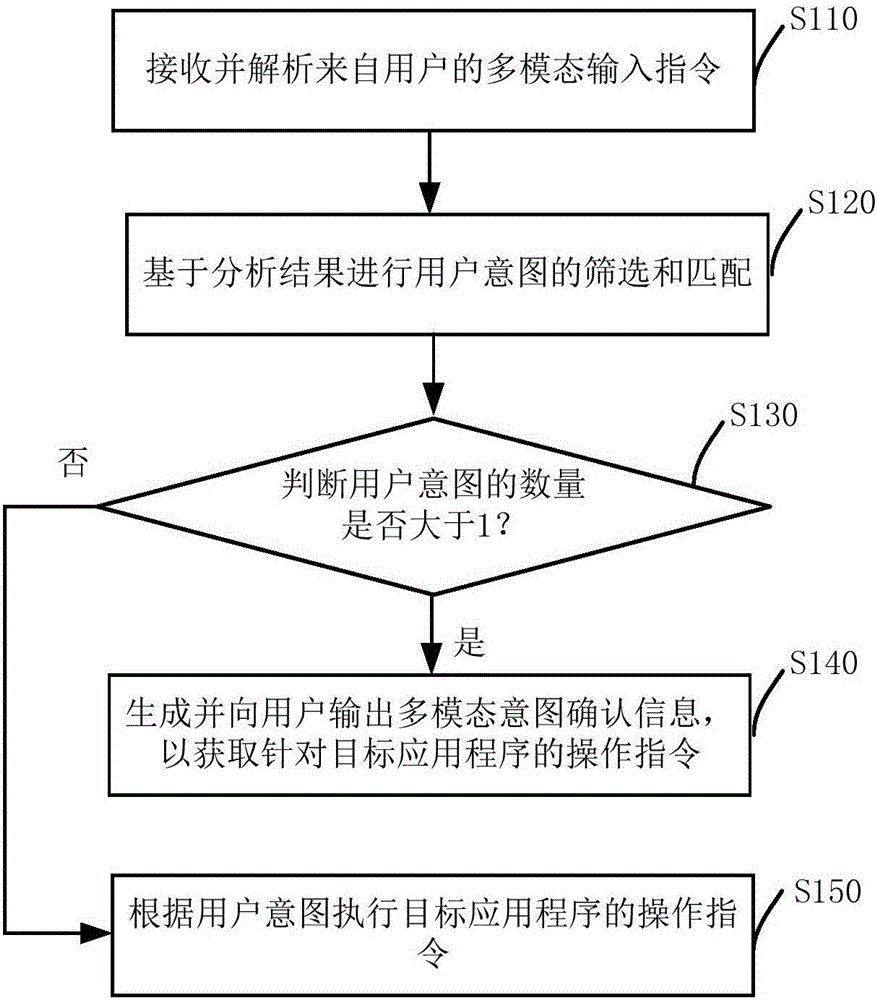
[0030] figure 1 It is a schematic flowchart of a multimodal interaction method related to an application program of an intelligent robot according to Embodiment 1 of the present invention. In the intelligent robot operating system. Refer below figure 1 Each step of the embodiment of the present invention will be described. The method of this embodiment mainly includes the following steps.
[0031] In step S110, the user's multi-modal input instruction is received, and the multi-modal input instruction is analyzed.
[0032] Multimodal input instructions mainly come from instructions input by users, and these multimodal input instructions include text data, audio data, video data, image data, and program instructions for enabling the robot to output certain actions or execute software or hardware. Since the intelligent robot in the embodiment of the present invention is a robot that does not have hardware input devices such as a keyboard, a mouse, and a touch screen, and is s...
Embodiment 2
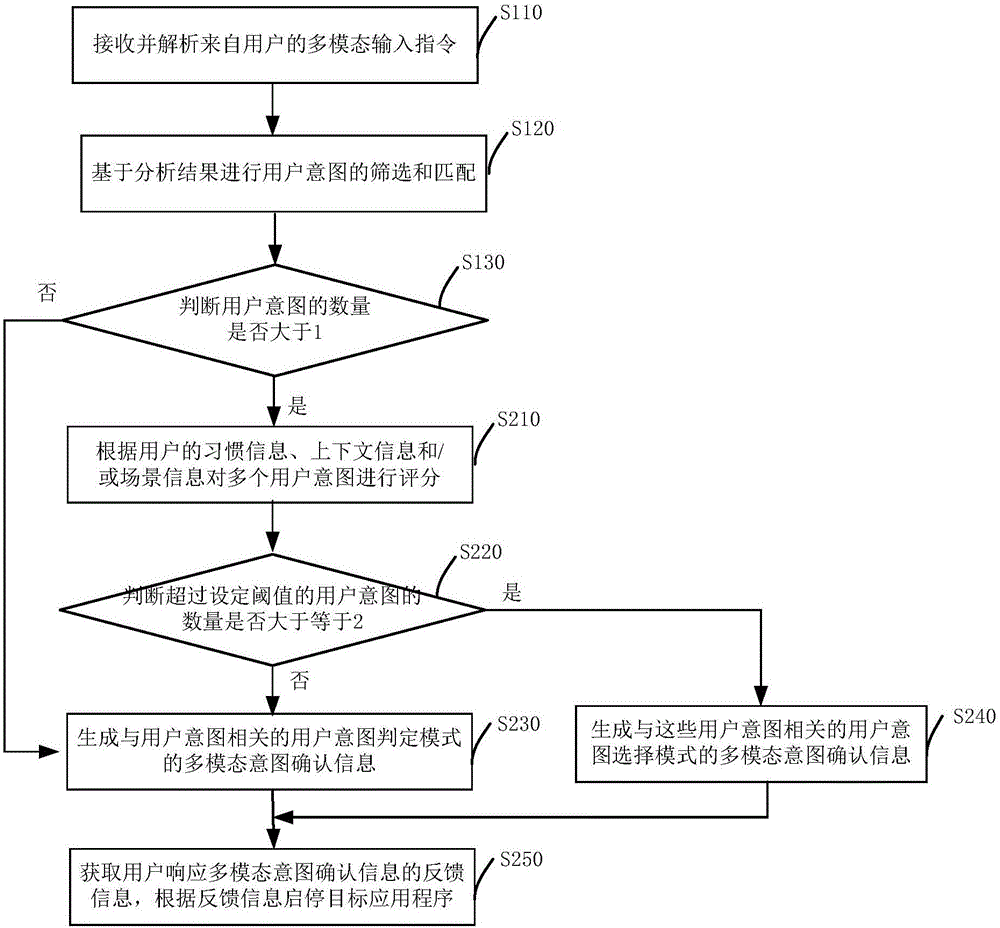
[0043] figure 2 It is a schematic flow chart of the multimodal interaction method related to the application program of the intelligent robot according to the second embodiment of the present invention. Similarly, the multimodal interaction method is preferably executed in the environment of the robot operating system, and the application program involved in it runs In this intelligent robot operating system. The method in this embodiment mainly includes the following steps, wherein the steps similar to those in Embodiment 1 are marked with the same reference numerals, and the specific content thereof will not be repeated, and only the different steps will be described in detail.
[0044] In step S110, the user's multi-modal input instruction is received, and the multi-modal input instruction is analyzed.
[0045] In step S120, filter and match user intentions based on the analysis results. Wherein the user intent includes the operation expression related to the application...
Embodiment 3
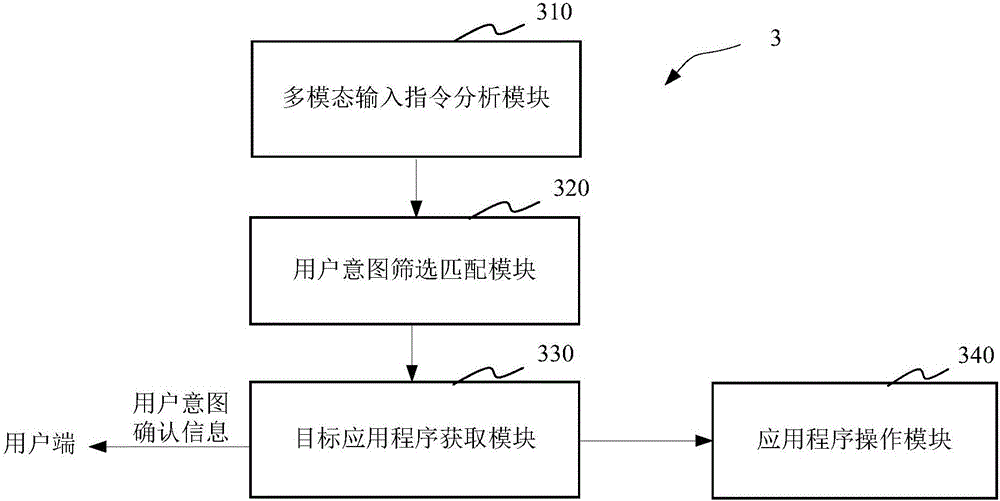
[0056] image 3 It is a schematic structural diagram of the multi-modal interaction system 3 related to the application program of the intelligent robot according to the third embodiment of the present invention. Such as image 3 As shown, the multimodal interaction system 3 of the embodiment of the present application mainly includes: a multimodal input instruction analysis module 310 , a user intention screening and matching module 320 , a target application acquisition module 330 and an application operation module 340 . The above-mentioned intelligent robot is installed with a robot operating system, and the application program runs in the robot operating system.
[0057] The multimodal input instruction analysis module 310 is configured to receive a user's multimodal input instruction and analyze the multimodal input instruction.
[0058] The user intention screening and matching module 320 is configured to perform screening and matching of user intentions based on anal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More