

CAN bus oriented non-destructive dynamic optimal scheduling method
A CAN bus, dynamic optimization technology, applied in the direction of bus network, data exchange through path configuration, digital transmission system, etc., can solve the problem of inability to flexibly adapt to system changes, static scheduling algorithm communication efficiency and network utilization, and algorithm complexity. , network resource overhead defects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The implementation manners of the present invention are described below through specific examples, and those skilled in the art can easily implement the content disclosed in this specification.
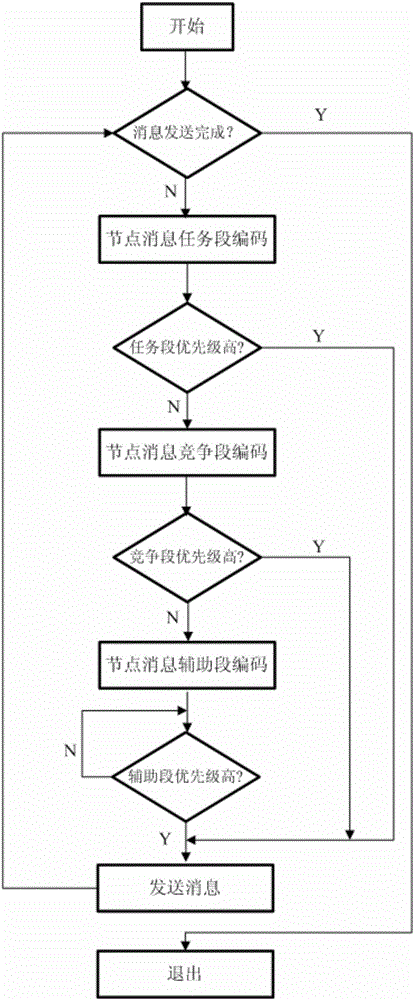
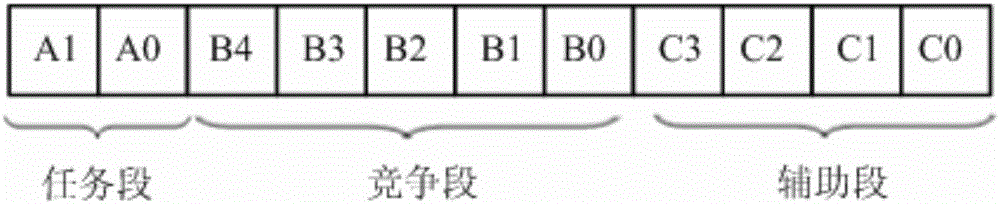
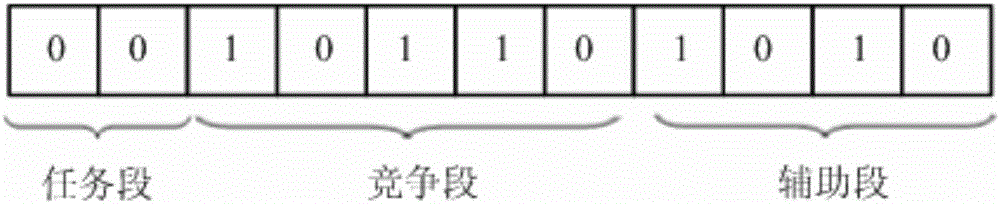
[0021] Such as figure 1 As shown, the present invention is oriented to the non-destructive dynamic optimization scheduling method of the CAN bus, and the identifier encoding of the CAN bus arbitration field is encoded by the mode of the task segment, the competition segment, and the auxiliary segment, and the digits of the task segment, the competition segment, and the auxiliary segment can be Determined by the specific system. When sending a message, compare the priority through three segments, task segment priority>competition segment priority>auxiliary segment priority, for messages with the same task segment priority, compare the competition segment priority, for the same competition segment priority message, compare secondary segment priorities. figure 2 It is the prior...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More