

Field fertilizing pesticide spraying work belt driving snake-shaped robot
A snake-like robot and crawler-driven technology, which is applied to tracked vehicles, motor vehicles, animal husbandry, etc., can solve the problems of ineffective killing of parasites, limited crop quality, and inability to solve the problem of liquid medicine, so as to achieve reasonable and effective spraying of liquid medicine , reduce unnecessary pollution, good off-road performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
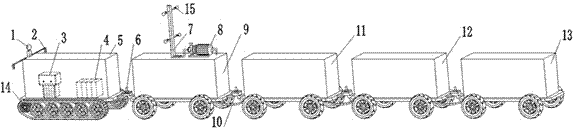
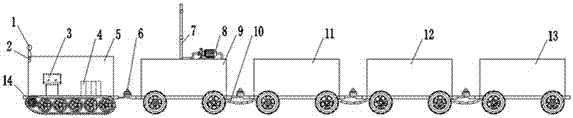
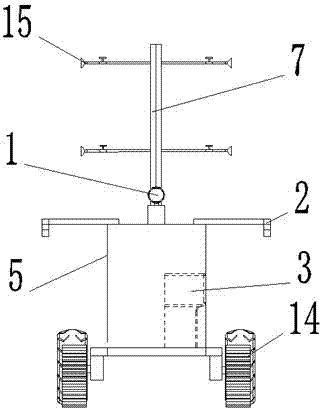
[0025] The structure schematic diagram, front view and left side view of the crawler-driven snake-shaped robot for field fertilization and spraying in this embodiment are as follows: figure 1 , figure 2 and image 3 shown. It consists of a crawler tractor (5), a plant approach detector (2), a control unit (3), an energy supply unit (4), a second wheeled compartment (9), and a liquid medicine (liquid fertilizer) delivery unit ( 10), (11), (12) and shower nozzle (15) and other parts constitute.
[0026] The crawler tractor (5) is located at the front end of the snake robot, and a camera (1), a plant approach detector (2), a control unit (3), and an energy supply unit (4) are arranged in sequence from top to bottom. The camera (1) is fixed on the top of the external front end of the tractor to obtain the current road conditions in real time; the plant approach detector (2) is respectively fixed on the left and right sides of the top of the external front of the tractor, and s...
specific Embodiment 2
[0032] The crawler-driven serpentine robot of fertilization and spraying in the field of the present embodiment, on the basis of the specific embodiment one, further defines the outer cavity of the spray head as a 2 / 3 symmetrical spherical cavity (16), and the spherical inner cavity ( 17) The tangential fit of the spherical surface is more suitable for the spraying angle requirements of different needs.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More