

A method and device for constructing a mathematical model based on a quadcopter
A quadcopter and mathematical model technology, applied in the field of aircraft control, can solve problems such as aircraft control loss of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
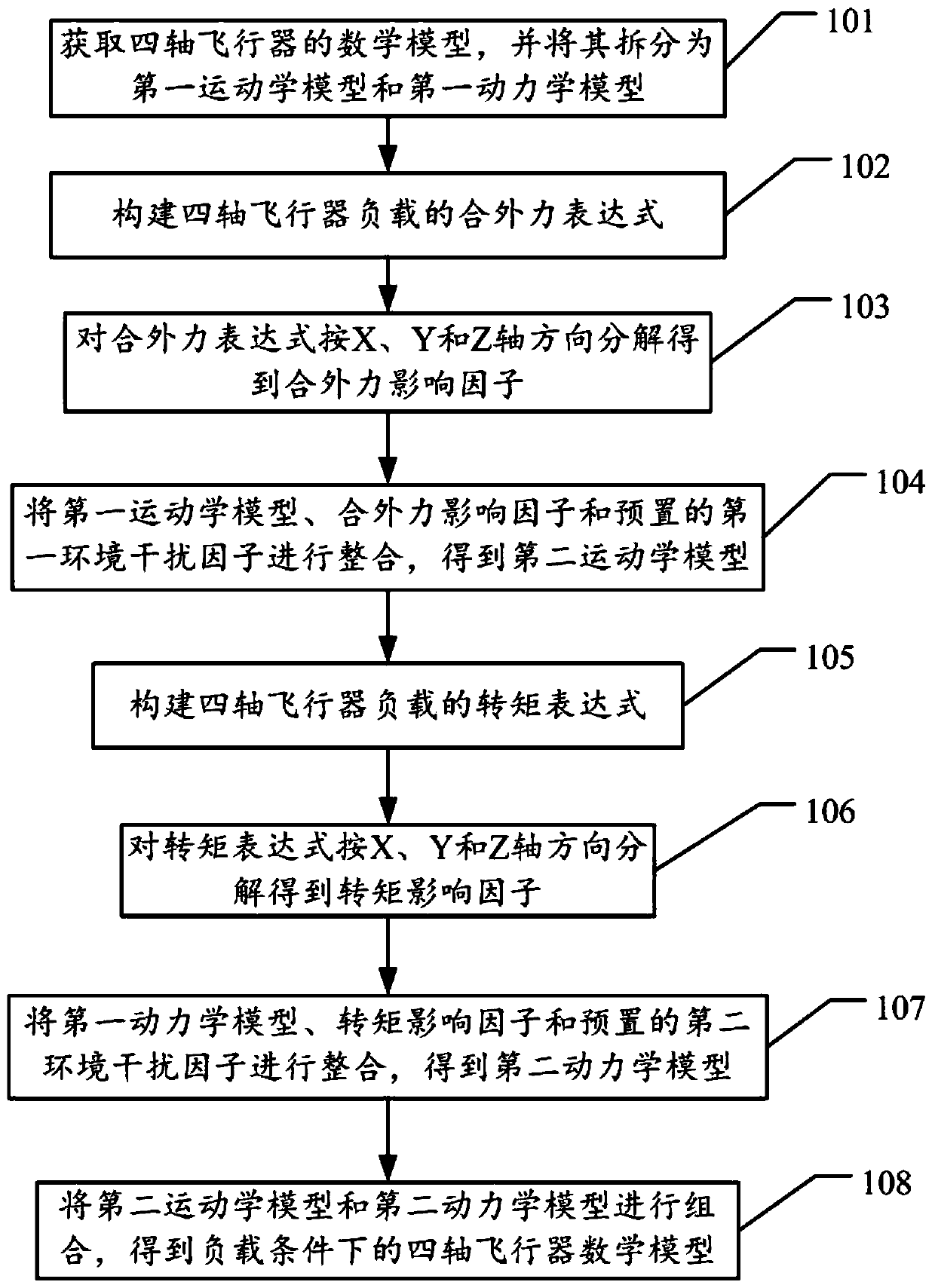
[0140] Such as figure 1 , a kind of first embodiment of the mathematical model building method based on quadcopter of the present invention, comprises:
[0141] 101. Obtain the mathematical model of the quadcopter, and split it into a first kinematics model and a first dynamics model;
[0142] The first kinematic model includes:
[0143] The first kinetic model includes:
[0144] 102. Construct the combined external force expression of the quadcopter load;
[0145] The resulting external force expressions include: in is the absolute speed of the load, M L is the weight of the load;
[0146] In this embodiment, in addition to the weight of the quadcopter itself, the weight loaded by the quadcopter is included in the calculation, which is more suitable for practical applications.
[0147] 103. Decompose the combined external force expression according to the X, Y and Z axis directions to obtain the combined external force influence factor;
[0148] Factors affectin...
no. 2 example
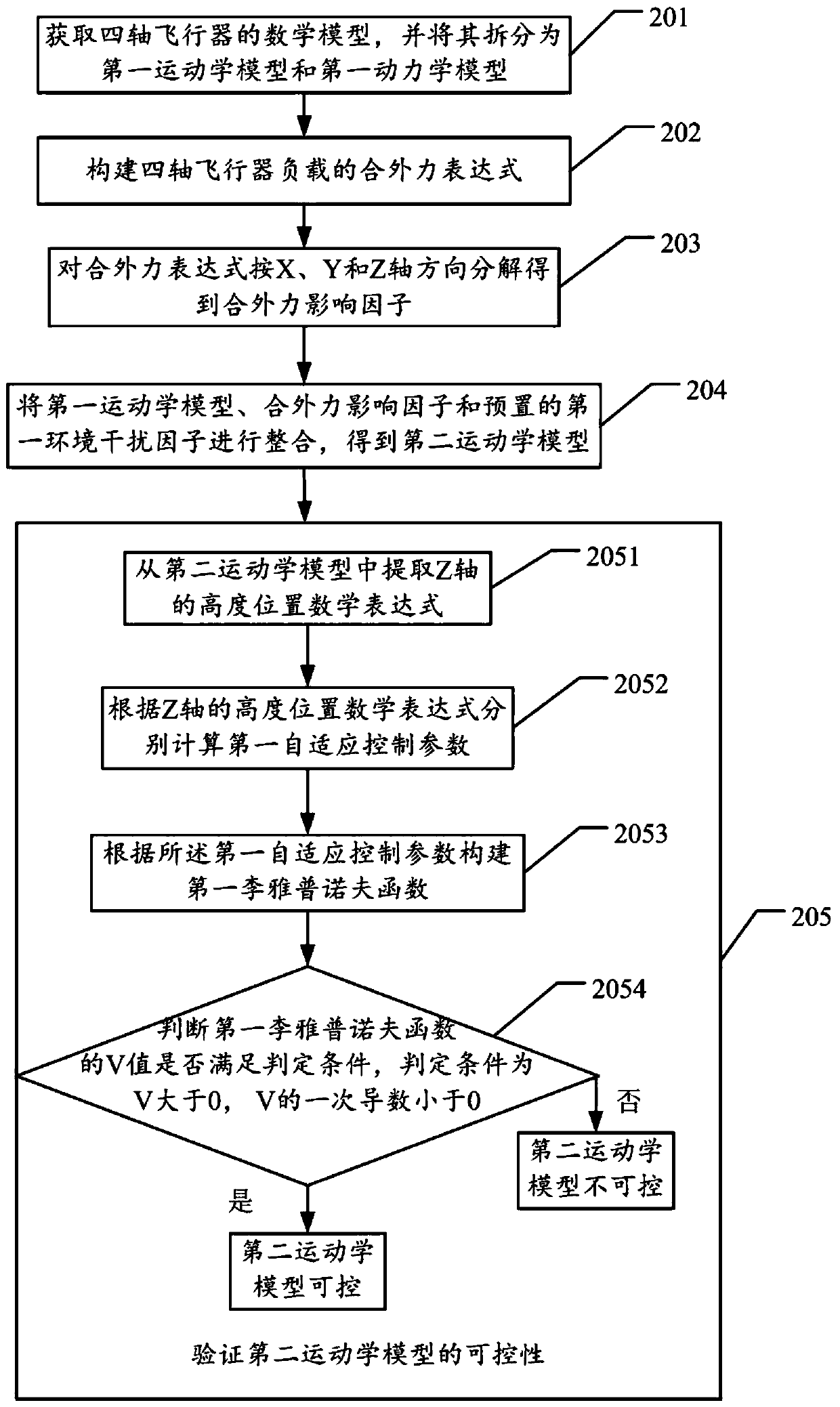
[0170] Such as figure 2 , a second embodiment of a method for constructing a mathematical model based on a quadcopter of the present invention, comprising:
[0171] 201. Obtain the mathematical model of the quadcopter, and split it into a first kinematics model and a first dynamics model;
[0172] 202. Construct the combined external force expression of the quadcopter load;
[0173] 203. Decompose the combined external force expression according to the X, Y and Z axis directions to obtain the combined external force influence factor;
[0174] 204. Integrate the first kinematics model, the combined external force influence factor and the preset first environmental disturbance factor to obtain a second kinematics model;
[0175] In this embodiment, steps 201-204 have the same content as steps 101-104 in Embodiment 1, and the effect is the same, so no further description is given.
[0176] 205. Verify the controllability of the second kinematics model;
[0177] Verify the co...
no. 3 example
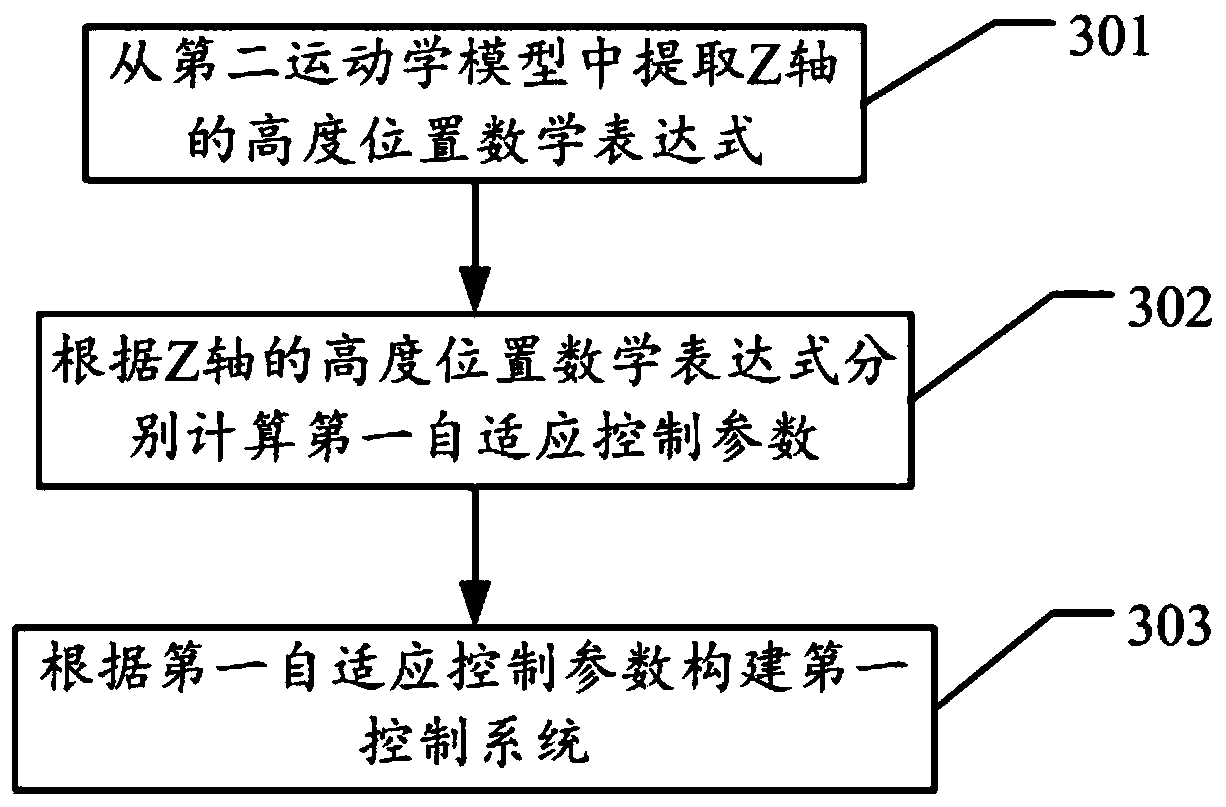
[0190] Such as image 3 , a third embodiment of a method for building a mathematical model based on a quadcopter of the present invention, comprising:
[0191] 301. Extract the mathematical expression of the Z-axis height position from the second kinematics model;
[0192] 302. Calculate the first adaptive control parameters respectively according to the mathematical expression of the Z-axis height position;
[0193] 303. Construct a first control system according to a first adaptive control parameter;
[0194] The first control system includes:
[0195] a first controller and a first adaptive rate;
[0196] The first controller includes:
[0197]
[0198] First adaptive rate:
[0199]
[0200]
[0201]
[0202] Among them, ∧ z , ∧ z1 , Γ z , Γ z1 Ω z ,Ω z1 , c 21 and c 22 is a positive control parameter, Φ z0 ,D z0 , Ψ z0 is the initial value when designing the parameters.
[0203] In this embodiment, steps 301-302 are the same as steps 2051-2052 in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More