Unmanned logistics vehicle based on depth learning
A deep learning, unmanned technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, program control, etc., can solve the problems of sparse feature information, long construction period, high transportation cost, and achieve The navigation control deviation is small, the cost is low, and the installation and debugging difficulty is small.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
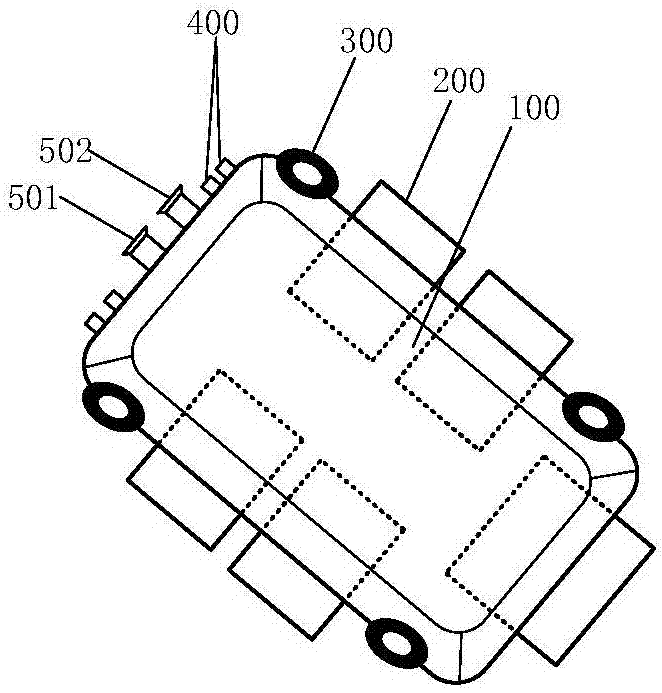
[0023] figure 1 It is a schematic diagram of the external structure of the logistics vehicle body. Depend on figure 1 It can be seen that two drawer doors 200 are installed on both sides of the logistics vehicle body 100, and one drawer door 200 is installed at the rear, a total of five drawer doors 200 for storing goods. Four mecanum wheels 300 are installed at the bottom of the logistics vehicle body 100, which can realize four-wheel omnidirectional driving. A set of ultrasonic obstacle avoidance modules 400 are installed on both sides of the head of the logistics vehicle body 100 for short-distance protective distance measurement and obstacle avoidance. Said camera A501 and camera B502 are installed in the middle position of the head of said logistics vehicle body 100, both of which constitute a binocular stereo visio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More