

A Cross-camera Pedestrian Trajectory Matching Method
A cross-camera and camera technology, applied in the field of cross-camera pedestrian trajectory matching, can solve problems such as measurement errors and low tracking accuracy, and achieve the effect of solving trajectory point alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
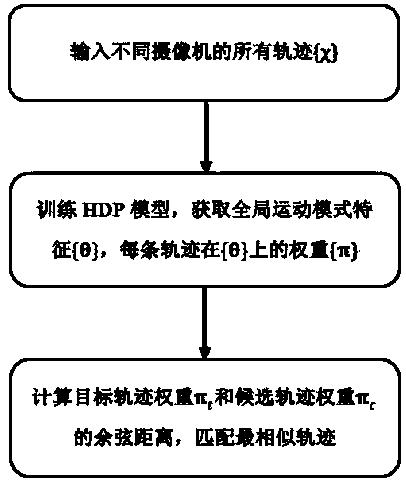
[0036] Such as figure 1 Described, the method provided by the invention specifically comprises the following steps:
[0037] Using {x}=(x 1 ,x 2 ,...,x L ) to represent a pedestrian trajectory, where x i Represents the observed value, L is the length of the trajectory, and each observed value x i It is composed of the position information of the current point and the motion direction information between adjacent points, where the value range of the position information is 160×120, and the motion direction information between adjacent points is divided into four directions: up, down, left, and right, that is, each observation value is is a three-dimensional vector, x i ∈R 3 .
[0038] On the above basis, the method provided by the invention comprises the following steps:
[0039] S1. Extract a pedestrian trajectory of the target camera as the target trajectory, and then use all the trajectories of the remaining cameras within the time period as candidate trajectories; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More