

Indoor positioning method and indoor positioning system based on Bluetooth, Wi-Fi, and inertial navigation technologies
An indoor positioning and Bluetooth technology, applied in the field of navigation, can solve the problems of high power consumption, low precision, and unsatisfactory high-precision real-time positioning and navigation, and achieve the effect of easy implementation and low complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
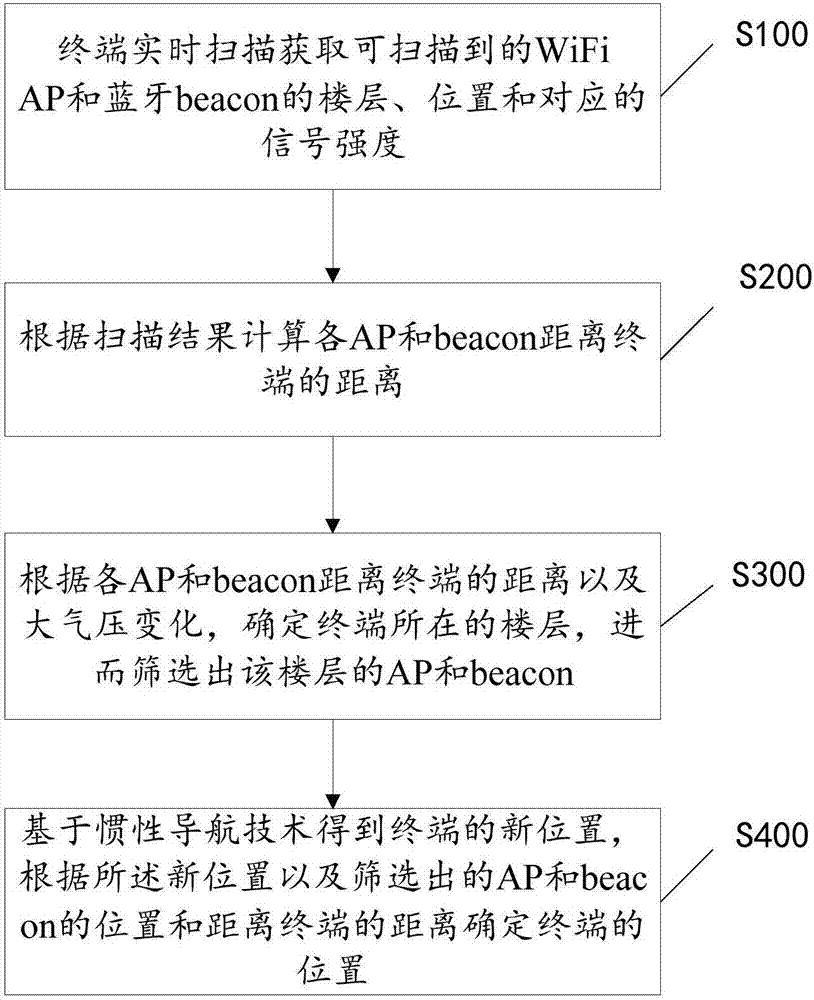
[0039] refer to figure 1 , an indoor positioning method is disclosed in Embodiment 1, the method includes periodically performing the following steps:
[0040] S100. The terminal scans in real time to obtain the floors, locations and corresponding signal strengths of scannable WiFi APs and Bluetooth beacons;
[0041] Specifically, the terminal scans the APs and beacons in real time, records the device information of the APs and the beacons, and acquires the floors and locations of the APs and the beacons according to the device information. Wherein, the device information includes: a MAC address or SSID for uniquely identifying the AP, and one or any combination of the following three records for uniquely identifying the beacon: UUID, major, and minor.
[0042]For example, in a specific implementation manner, the scanning data records of WiFi APs are shown in Table 1, and the scanning data records of Bluetooth beacons are shown in Table 2.
[0043] Table 1 Scanning data of W...
Embodiment 2
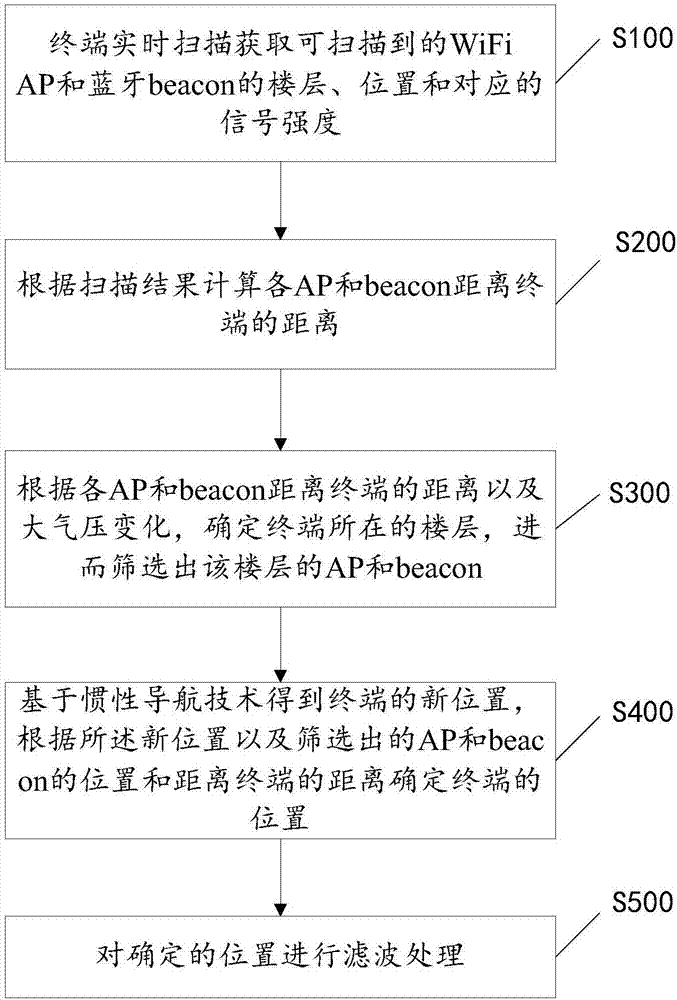
[0074] In this embodiment, the following step S500 is added on the basis of the first embodiment, specifically:
[0075] S500. Perform filtering processing on the position determined in step S400.
[0076] In this step, a variety of different filtering techniques can be used, such as Kalman filtering, particle filtering, etc., and a simple smoothing filter can also be used, as shown in the following formula:
[0077]
[0078] In the formula, α is a smoothing coefficient with a range of [0, 1], which can be determined according to the actual moving speed of the terminal, for example, 0.2 can be used. x new 、y new is the position of the finalized terminal, x t-1 、y t-1 Indicates the position of the terminal at the previous moment, x t 、y t is the location of the terminal determined in step S400.
Embodiment 3
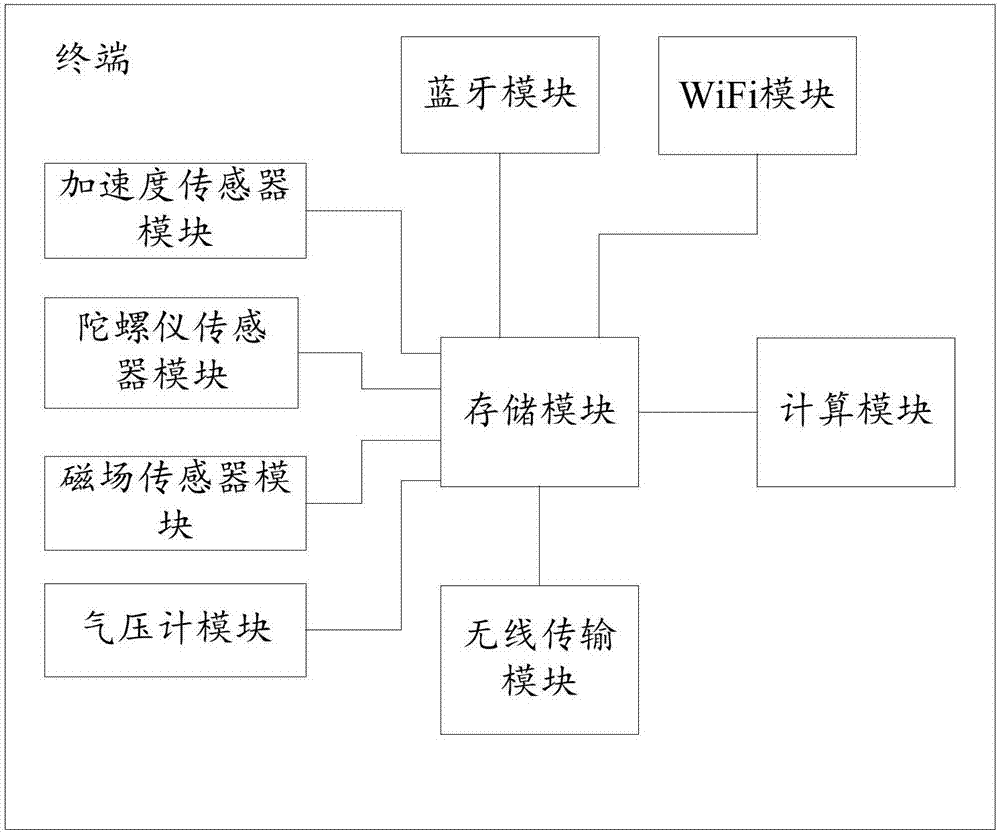
[0080] This embodiment discloses an indoor positioning system that belongs to the same inventive concept as the above positioning method, and the system includes a terminal, a WiFi AP and a Bluetooth beacon. The terminal includes: a WiFi module, a Bluetooth module, a barometer module, a calculation module, a storage module, a wireless transmission module, a magnetic field sensor module, a gyroscope sensor module, and an acceleration sensor module.
[0081] WiFi module, bluetooth module are used to perform scanning. The storage module is used for storing data, including scanning data, data of various sensors and barometers, and calculation data of the calculation module. The calculation module is used to retrieve data from the storage module to execute all the calculations in the above indoor positioning method. The wireless transmission module is used to communicate with the positioning center to obtain the data needed in the calculation, such as the position table of AP and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More