

Control method for active heave compensation of deep sea equipment
A technology of heave compensation and control method, which is applied in the direction of hoisting device, spring mechanism, etc., can solve the problems of offset working position of deep-sea equipment and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0077] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
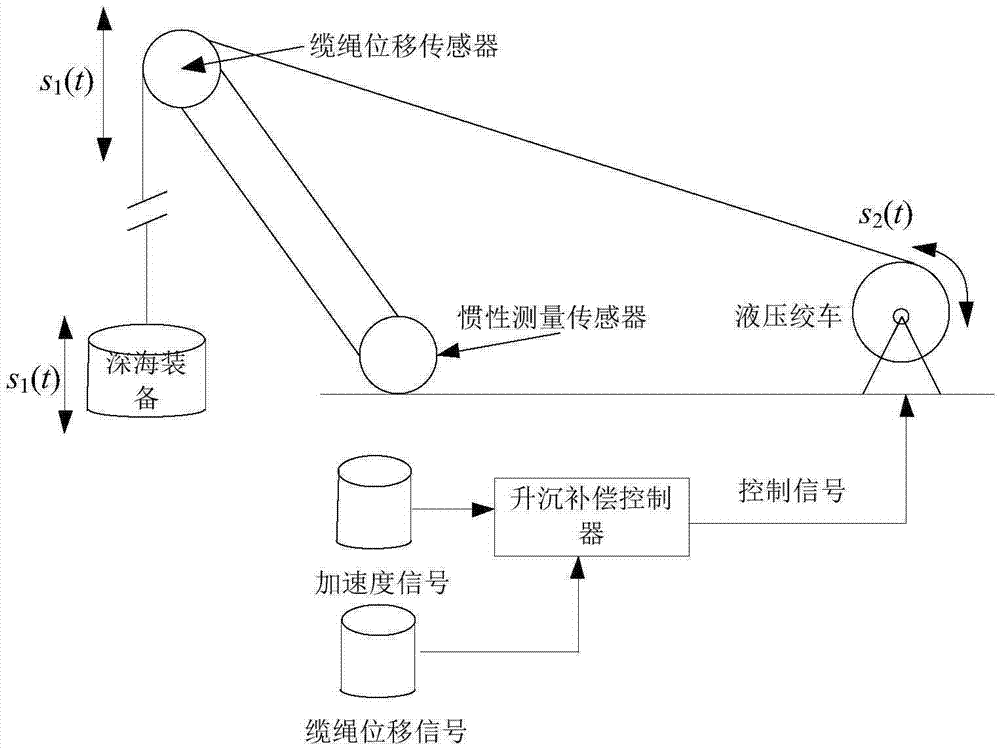
[0078] Such as figure 1 As shown, in the present invention, the heave displacement of the mother ship and the cable retracting displacement are given to the input end of the controller, and the control signal output by the controller is given to the bidirectional electronically controlled proportional valve of the hydraulic valve-controlled motor system, so that the winch can pass the retracting cable to compensate for the heave displacement of the mother ship.
[0079] Step 1: Real-time detection of the acceleration value a(k) of the acceleration of the heave movement of the mother ship, and the heave displacement signal s of the mother ship is obtained after secondary integration 1 (k);
[0080] Step 2, use the cable displacement sensor to measure the displacement signal s of the winch cable 2 (k);
[0081] Step 3, mother ship heave disp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More