Deepwater robot multi-model EKF combined navigation device and method
A combined navigation and robotics technology, applied in the field of multi-model EKF combined navigation devices for deep-water robots, can solve problems such as deviations in underwater robot calibration, accumulation of navigation deviations over time, and inability to effectively overcome the interference of outliers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
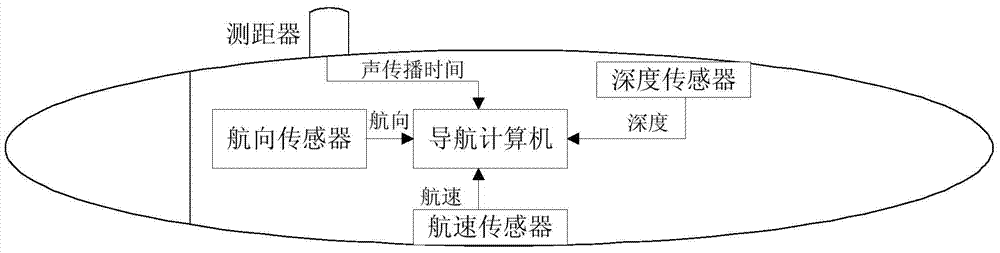
[0082] The invention consists of no less than three beacons and deep-water robots. The deep water robot navigation sensor configuration is as follows: figure 1 As shown, it consists of a range finder, a heading sensor, a speed sensor, and a depth sensor.
[0083] The rangefinder is installed outside the shell of the deep-water robot, connected to the navigation computer inside the deep-water robot, and uses acoustic signals to measure the distance from the deep-water robot to each beacon;
[0084] Beacons, at least three, deployed on the seabed with known coordinates;
[0085] Sensors, including heading sensors, speed sensors and depth sensors, are all installed in the deep-water robot and connected to the navigation computer to measure the heading, speed and depth of the deep-water robot respectively.
[0086] The navigation computer is us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



