

A center of mass adjustment device for an underwater robot
The technology of an underwater robot and an adjustment device is applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., which can solve the problems of complex system and large occupied volume, and achieve the effects of large adjustment range, compact structure and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
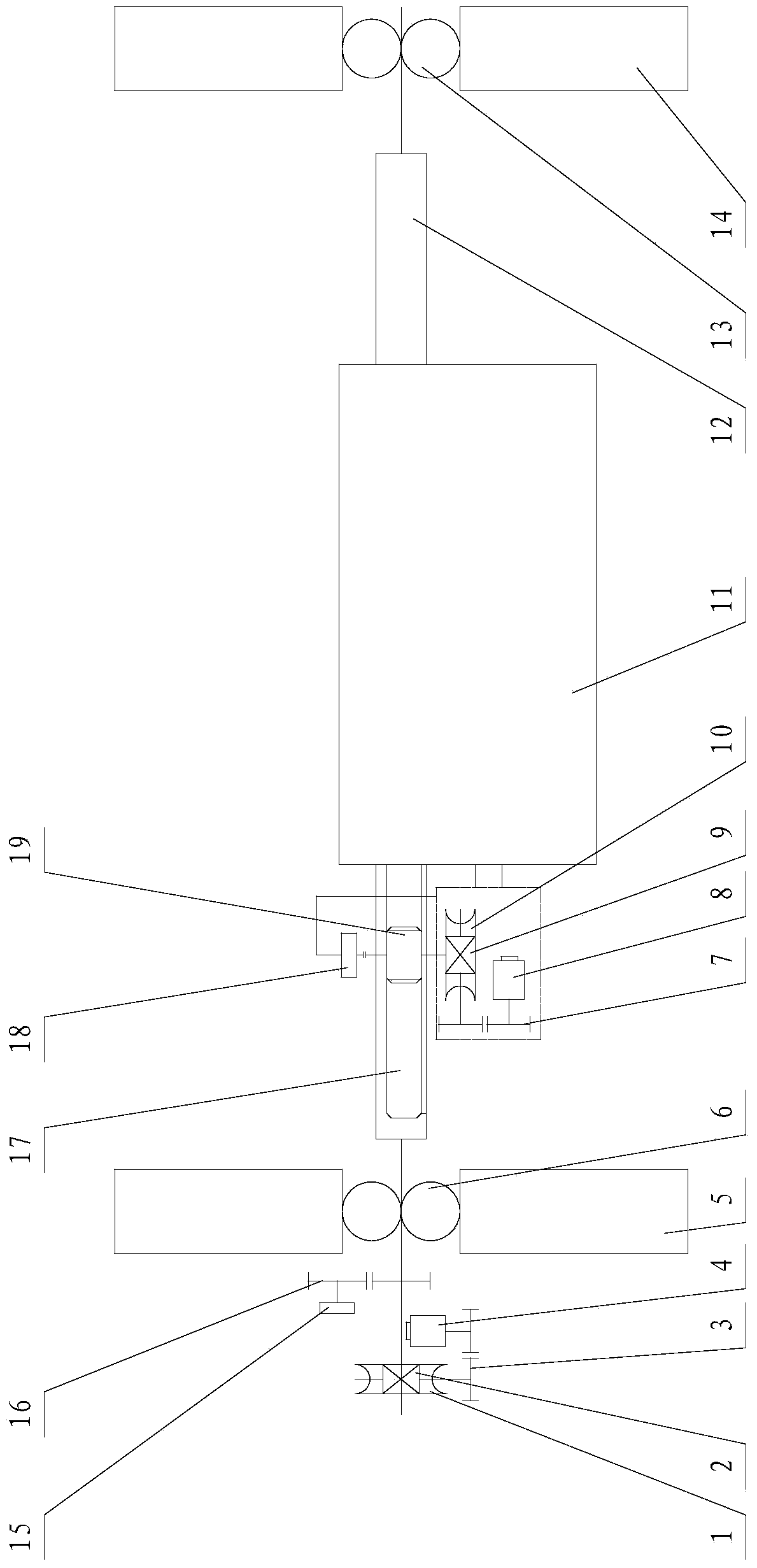
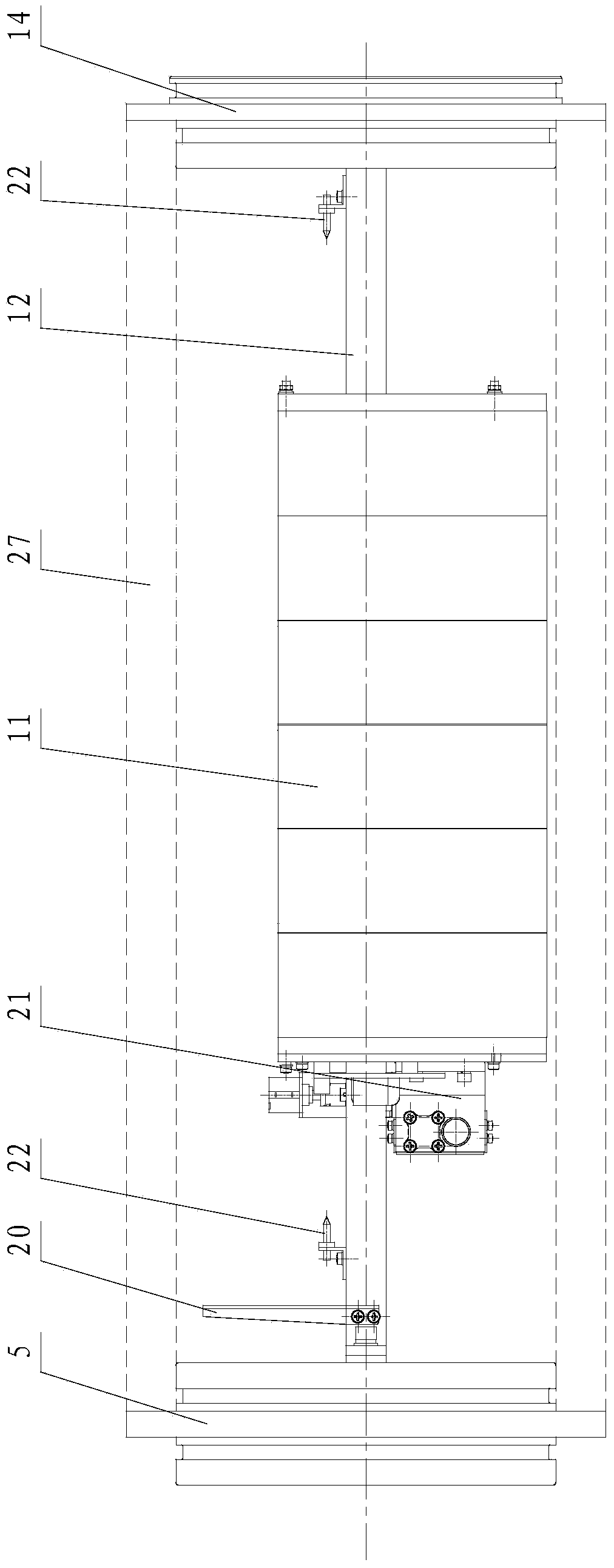
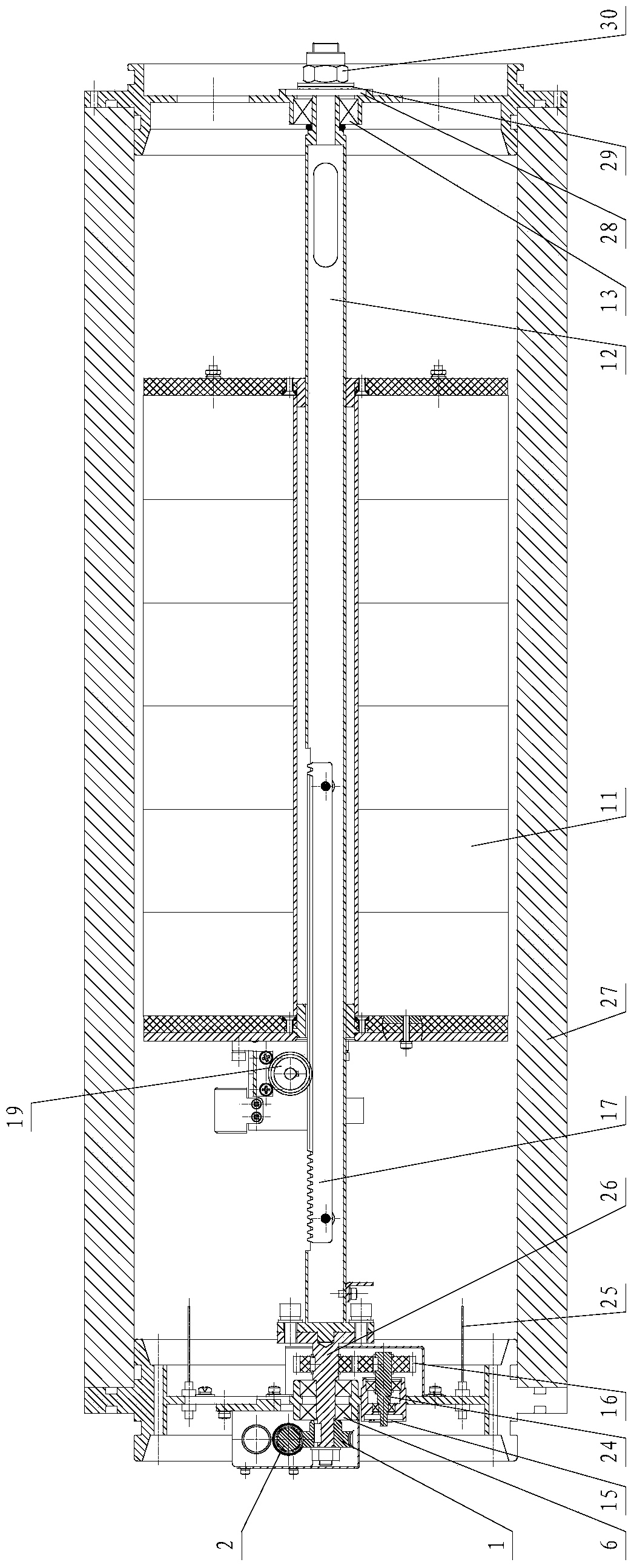
[0027] Such as Figure 1~4 As shown, the present invention includes a pressure-resistant cabin body 27, a front support ring 5, a rear support ring 14, an eccentric battery pack 11, a square tube shaft 12, a heel drive device and a pitch drive device 21, wherein the two pressure-resistant cabin body 27 The ends are respectively sealed and connected with the front support ring 5 and the rear support ring 14, and the square tube shaft 12, the eccentric battery pack 11 and the pitch drive device 21 are all located in the pressure-resistant cabin 27.
[0028] The heel driving device is installed on the front support ring 5, and includes heel motor 4, heel equal-diameter gear set 3, heel worm gear 1, heel worm 2 and heel shaft 26, and heel motor 4 passes through heel fixed seat 23 is fixedly connected on the front support ring 5, and the heeling worm 2 is rotatab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More