

Environment sensing system and method based on coordinated USV (Unmanned Surface Vessel) group
An environment perception and unmanned boat technology, applied in the field of environment perception system, can solve the problems of insufficient information accuracy and limited environmental perception ability of a single unmanned boat, so as to enhance the ability of environment perception, enhance the scope and accuracy of environment perception , easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout.
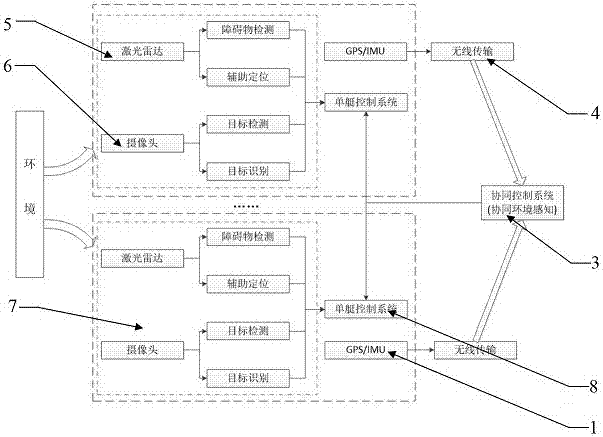
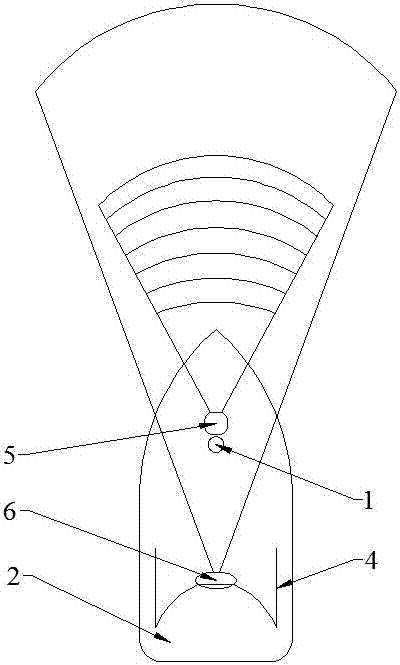
[0022] Such as figure 1 As shown, an environment perception system based on a cooperative unmanned boat group includes a single boat perception module 7 , a cooperative control system module 3 , a wireless transmission module 4 , a GPS / IMU module 1 and a single boat control system module 8 . Such as figure 2 As shown, the GPS / IMU module 1 is installed on the unmanned boat 2, and is used to obtain the position information and attitude information of each unmanned boat in real time, assisting the normal operation of other systems, and is an important unit for the autonomous control of the unmanned boat. The single boat perception module 7 includes a camera 6 and a laser radar 5, the laser radar 5 is used for obst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More