

UAV real-time obstacle avoidance system and method based on binocular vision
A technology of binocular vision and unmanned aerial vehicles, which is applied in control/regulation systems, non-electric variable control, instruments, etc., can solve problems such as easy lag, low precision, and loss of user groups, so as to ensure safe flight, The system structure is simple and the effect of avoiding hysteresis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0028] At present, the fast obstacle avoidance of UAV is an important problem in the field of UAV research, and it has many characteristics different from the obstacle avoidance of land intelligent robots. The flying environment of UAVs is uncertain and complex, and it is necessary to continuously detect and measure the surrounding environment to avoid collisions with obstacles or even crashes. UAVs are small in size and limited in load capacity, and cannot carry heavy acoustic detectors. Therefore, it is necessary to find a real-time obstacle avoidance system and method for UAVs based on binocular vision.
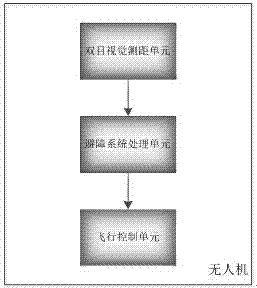
[0029] The present invention provides a real-time obstacle avoidance system for unmanned aerial vehicles based on binocular vision, such as figure 1 As shown, the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More