

Self-adaptive wearable submissive exoskeleton rehabilitation manipulator
A wearable and exoskeleton technology, applied in passive exercise equipment, medical science, prosthesis, etc., can solve the problems of complex structure, poor wearable adaptability, large volume and weight, etc., and achieve human-computer interaction safety, low cost, The effect of wearing comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The application principle of the present invention will be further described below with reference to the drawings and specific embodiments.
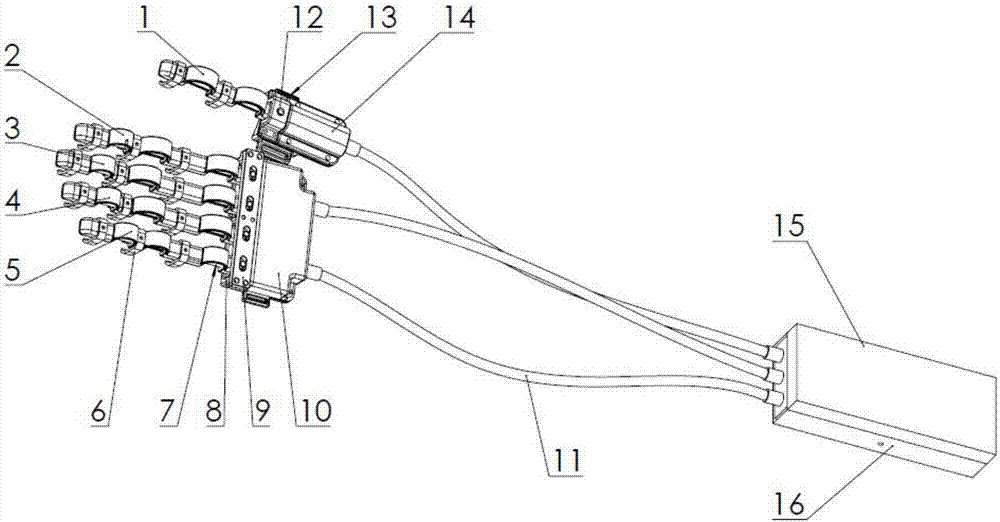
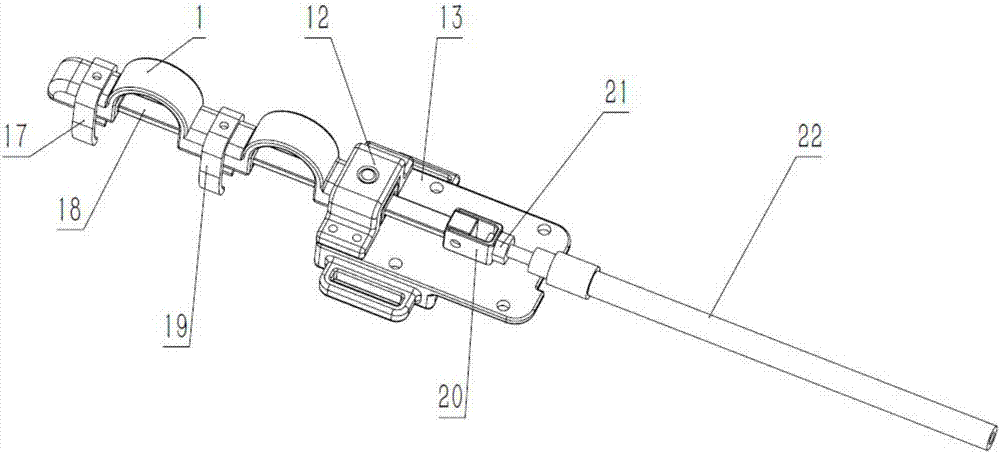
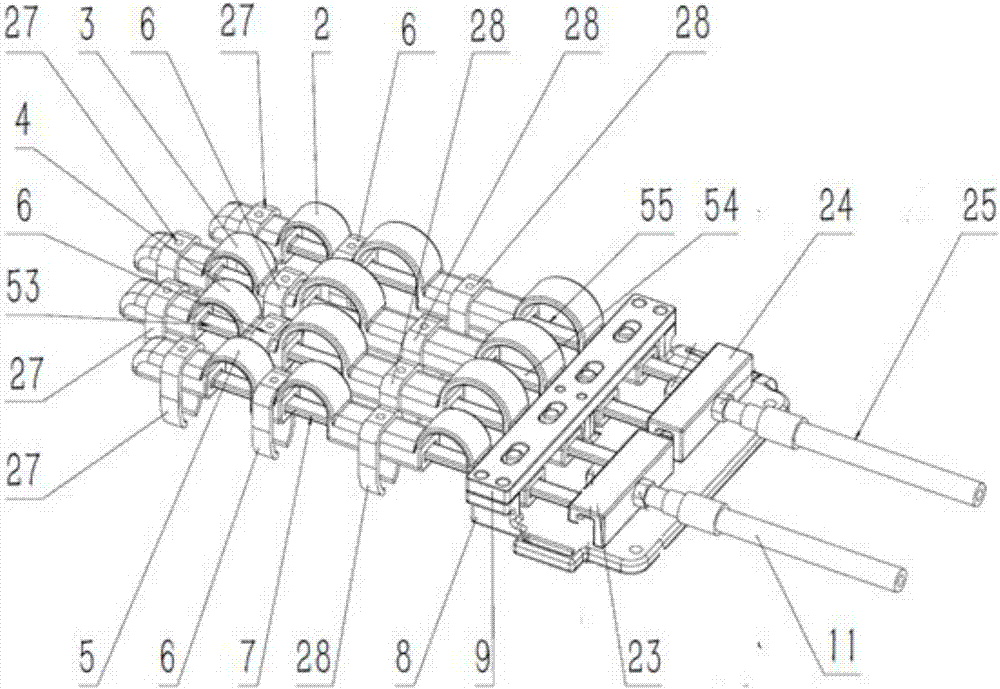
[0023] Such as Figure 1 to Figure 5 As shown, the adaptive wearable compliant exoskeleton rehabilitation manipulator of the present invention includes thumb 1, index finger 2, middle finger 3, ring finger 4, pinky 5, pinky flexible drive push rod 7, thumb flexible drive push rod 18, and index finger flexible Drive push rod 55, middle finger flexible drive push rod 54, hand back support plate 8, finger holder 9, first Bowden cable 11, second Bowden cable 22, third Bowden cable 25, thumb holder 12. Thumb end support plate 13, ring finger flexible drive putter 53, middle finger flexible drive putter 54, index finger flexible drive putter 55, thumb flexible drive putter 18, motor box 16, U-shaped clip 20, first movement The coupling slider 23, the second motion coupling slider 24, the first linear push rod motor 50, the second linear p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More