Active and reactive coordination optimization control method of distributed photovoltaic power distribution network
A distributed photovoltaic, optimized control technology, applied in photovoltaic power generation, reactive power adjustment/elimination/compensation, reactive power compensation, etc., can solve the problem that the control method cannot be applied to distribution lines, and cannot be coordinated and optimized control of active and reactive power.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
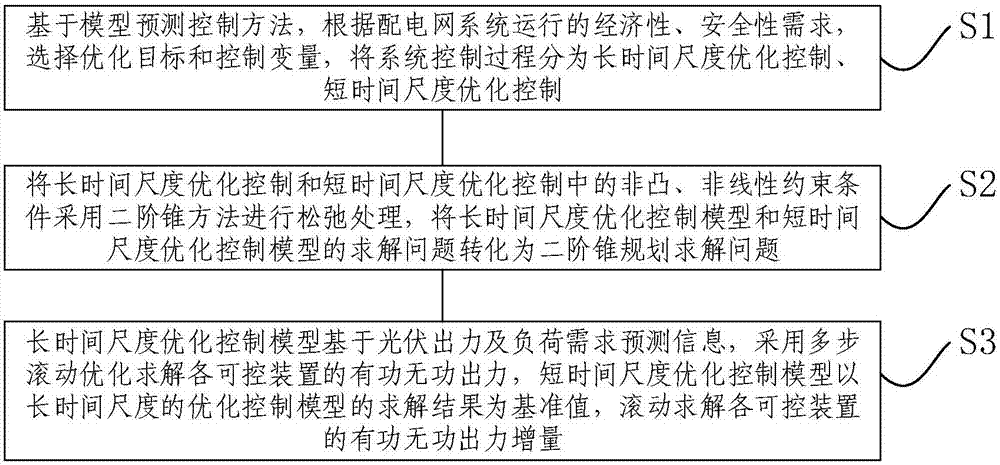
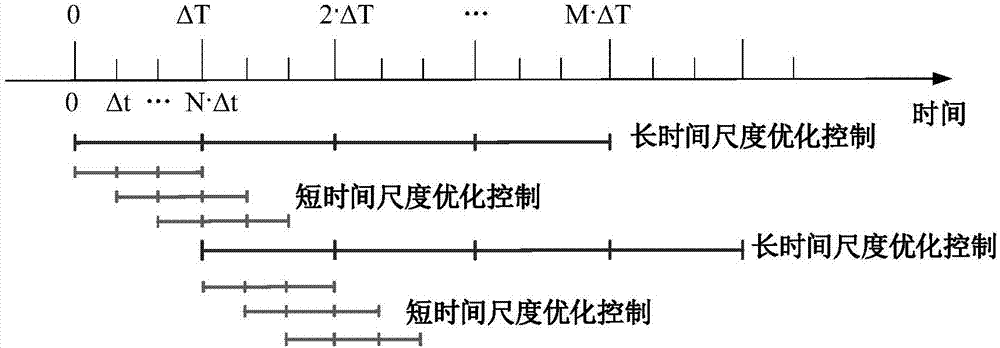
[0057] like figure 1 and figure 2 As shown, the figure shows a coordinated optimal control method for active and reactive power in a distributed photovoltaic power distribution network, including:
[0058] S1. Based on the model predictive control method, according to the control objectives and control variables of different time scales, the system control process is divided into long-time scale optimal control and short-time scale optimal control, and the long-time scale optimal control model and short-time scale optimization control model are established. control model;
[0059] S2. Use the second-order cone method to relax the non-convex and nonlinear constraints in the long-time-scale o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More