

Path tracking obstacle avoidance and guidance method
A path tracking and obstacle avoidance technology, which is applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., can solve the problems that cannot be applied to large commercial ships, etc., achieve simple and easy implementation, and improve the degree of automation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] In order to make the technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
[0076] like Figure 4 and Figure 9 Shown is the ship path tracking control logic structure diagram of the path tracking obstacle avoidance guidance algorithm disclosed in the present invention and the execution flow chart of the tracking obstacle avoidance guidance algorithm (GVS in the figure represents a guided virtual boat, and DVS represents a dynamic virtual boat). like Figure 4 The entire execution module of the ship shown is divided into two parts, the guidance system and the control system, and the guidance module adopts the path tracking and obstacle avoidance guidance algorithm proposed by the present invention.
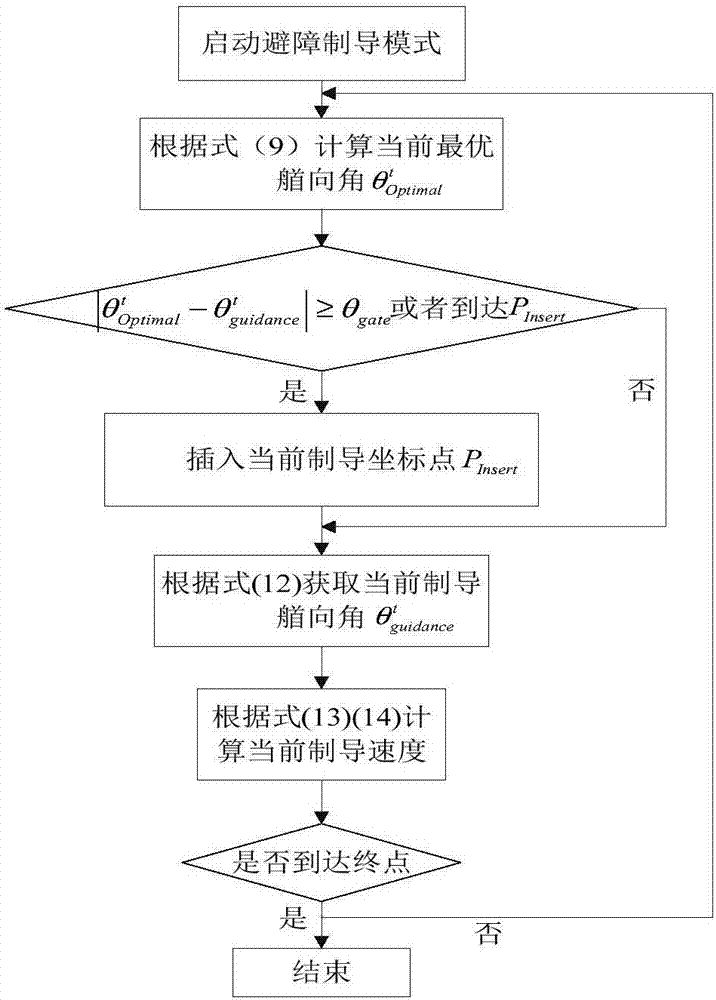
[0077] like Figure 9 The specific steps of the path tracking ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More