

Cooperative interaction control system for craniotomy robot
A technology of interactive control and robotics, applied in the direction of surgical robots, program-controlled manipulators, manipulators, etc., can solve the problems of use scene restrictions, algorithm security, and strict requirements for function realization, so as to reduce complexity and improve surgical efficiency and quality , the effect of reducing fatigue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] The present invention will be described in detail below with reference to the accompanying drawings and examples.
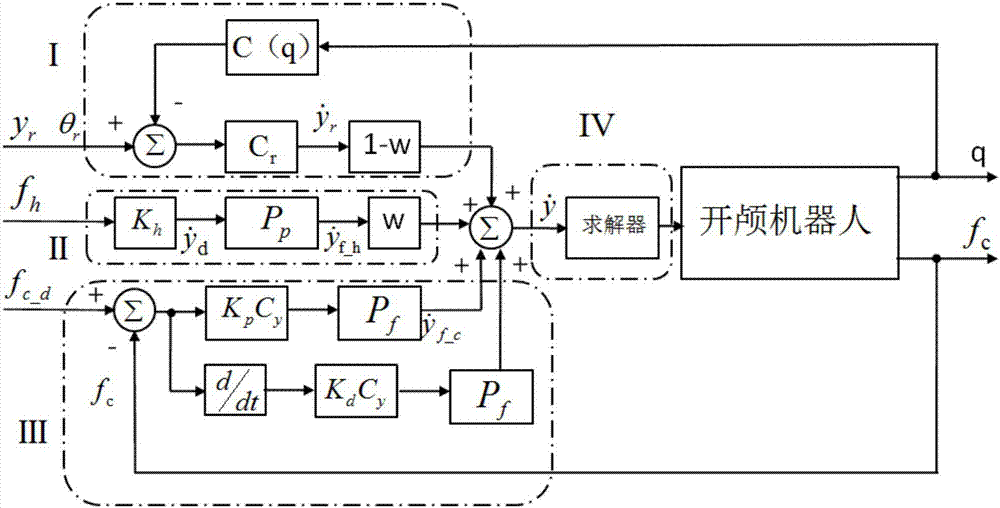
[0024] as attached figure 1 As shown, the present invention provides a collaborative interactive control system for a craniotomy robot. The system includes four modules in the dotted line, namely: motion restriction module I, doctor-robot interaction module II, robot-patient interaction module III and Solver IV;
[0025] Among them, the movement limitation module I is used to track the position of the robot in real time and compare it with the limited area, so as to limit the movement of the robot in a certain area; the doctor-robot interaction module II is used to complete the real-time speed control of the robot by the doctor, namely The doctor drags the robot to move; the robot-patient interaction module III maintains a certain contact force between the end of the milling cutter and the bottom surface of the skull during the skull milling process, and ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More