

Accurate positioning and parking method of trackless navigation AGV
A technology of preset positions and reflectors, applied in positioning, navigation calculation tools, radio wave measurement systems, etc., can solve complex path limitations, it is difficult to make up for the lack of SLAM technology, and areas without QR codes cannot be navigated And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
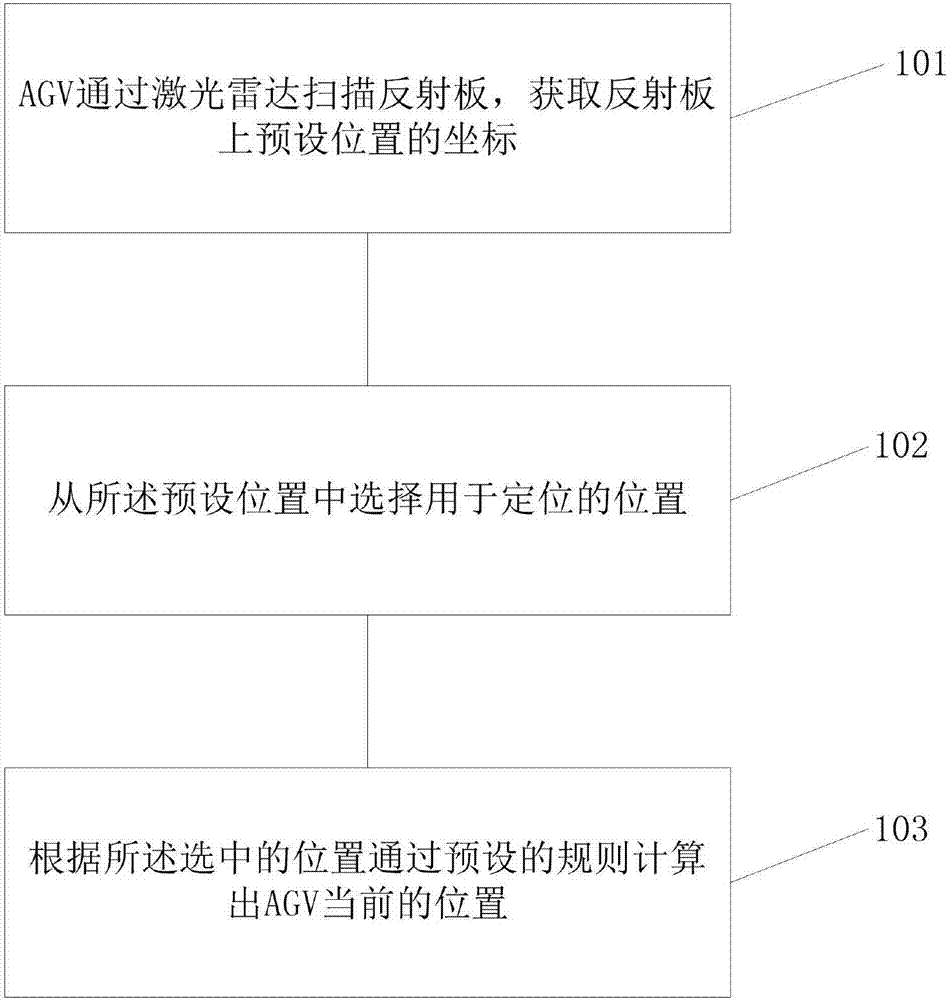
[0043] The embodiment of the present invention provides a precise positioning and parking method of a trackless navigation AGV, such as figure 1 As shown, the method includes:
[0044] Step 101, the AGV scans the reflector through the lidar to obtain the coordinates of the preset position on the reflector;
[0045] Step 102, selecting a location for positioning from the preset locations;
[0046] Step 103, calculate the current position of the AGV according to the selected position through preset rules.
[0047] Further, the AGV scans the reflection plate through the lidar, and obtaining the coordinates of the preset position on the reflection plate includes:
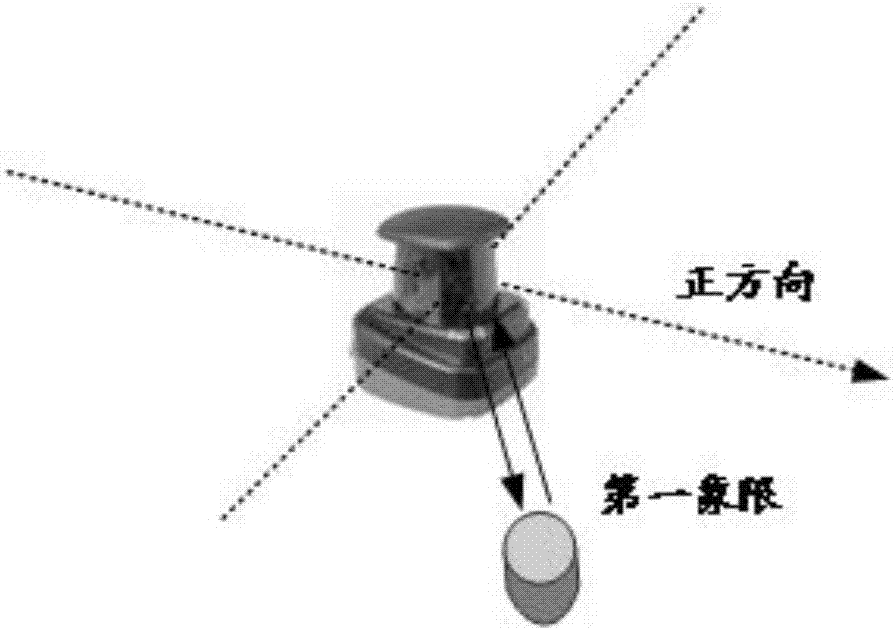
[0048] Taking the position of the lidar as the origin of coordinates, each laser beam returns a distance and a corresponding echo intensity value during scanning to the surroundings;
[0049] Calculate the position of the reflector according to the echo intensity value;
[0050] Obtain the angle information of the r...
Embodiment 2
[0065] The embodiment of the present invention provides a precise positioning and parking method of a trackless navigation AGV, such as Figure 1 to Figure 6 As shown, the method includes:
[0066] (1) Use the lidar to scan the reflector to build a map, and obtain the precise coordinates of each position on the reflector.
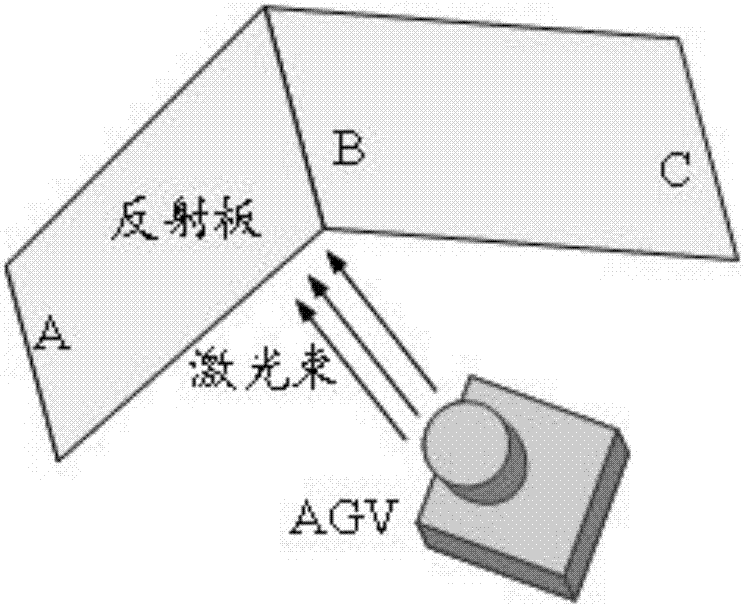
[0067] The laser beam of the laser radar scans onto the reflector at a certain frequency. The laser radar is generally installed on the top of the AGV, mainly for a good view and to be able to scan the reflector in all directions. The principle of laser radar scanning to reflector, such as figure 2 shown. The trackless navigation AGV is constantly moving and changing directions in the work area, and the arrangement of the triangular reflectors should ensure that the AGV can scan enough special points during real-time movement (such as figure 2 In A, B, C three points), in order to locate.
[0068] Before using lidar and reflectors for navigation, it i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More