

Improved grid topological semantic environment map construction method
A semantic environment and construction method technology, applied in the field of service robots, can solve problems such as not including human semantic information, achieve the effects of improving practicability and acceptability, high efficiency, and reducing the cognitive gap
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with specific drawings and embodiments.
[0019] In the improved grid topology semantic environment map construction method proposed by the present invention, the order of composition construction is grid layer, topology layer, semantic layer, and the map search sequence during navigation is semantic layer, topology layer, grid layer. In order to reduce the cognitive gap between the grid data of the robot's cognition environment and the semantic concepts of the human cognition environment, a three-layer grid topological semantic map is established in this system from bottom to top. The bottom layer is the grid layer, which is used for the robot to understand the environment, such as positioning, path planning and obstacle avoidance.
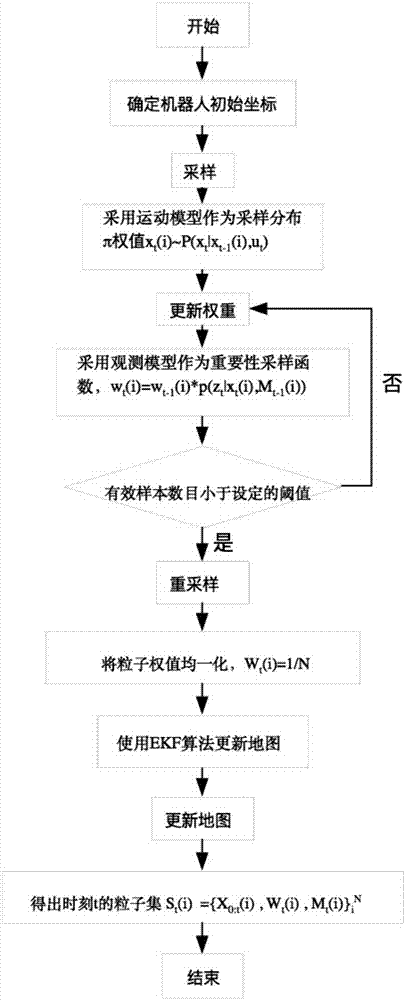
[0020] The underlying raster map is constructed using the robot odometer and laser sensor data through the Gmapping algorithm; the top layer is the semantic layer, which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More