

Height information-based unmanned vehicle lane scene segmentation method
A technology of scene segmentation and height information, applied to instruments, character and pattern recognition, computer components, etc., can solve problems such as excessive noise, unclear boundaries between non-road areas and road areas, and achieve the effect of reducing noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
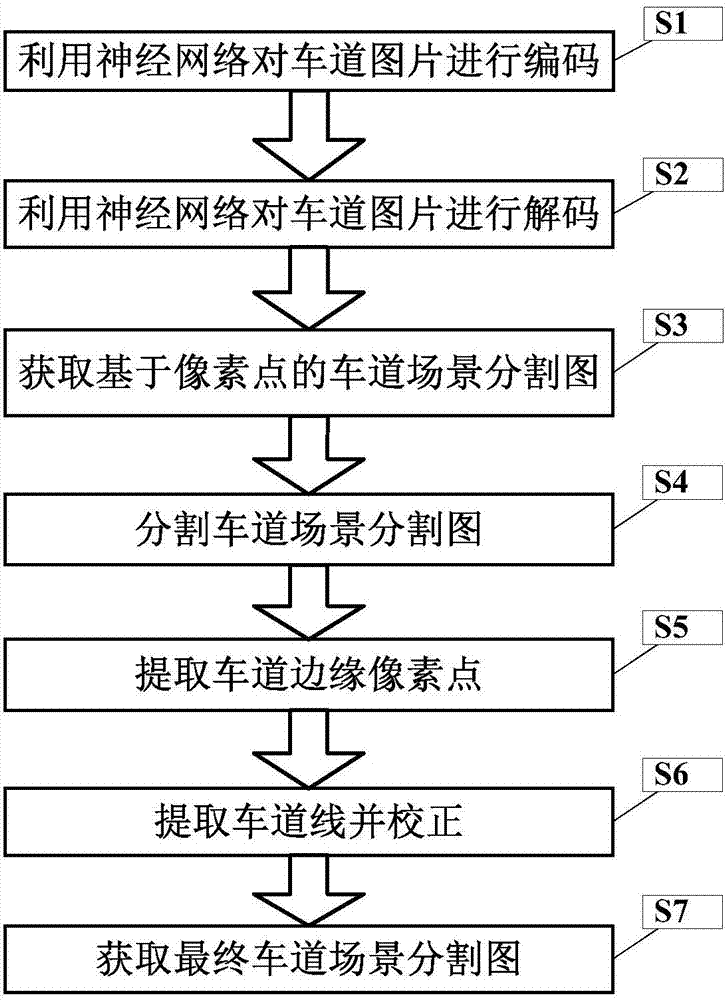
[0025] figure 1 It is a flowchart of the scene segmentation method for unmanned vehicle lanes based on height information in the present invention.
[0026] In this example, if figure 1 Shown, the present invention a kind of unmanned vehicle lane scene segmentation method based on height information, comprises the following steps:
[0027] S1. Use the neural network to encode the lane picture
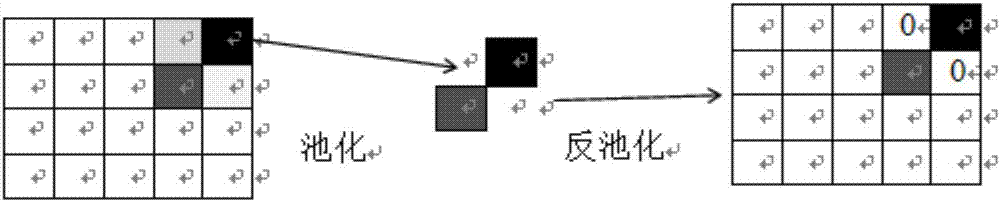
[0028] In this embodiment, the vehicle-mounted camera is used to collect lane pictures, and then the collected lane pictures are input into the neural network, and the convolution operation and pooling operation of the coding part of the neural network are used to perform feature extraction on the input lane images to obtain a sparse feature map.
[0029] In this embodiment, the specific operations of each convolutional layer are: 1), use the template matrix to perform matrix shift and multiplication operations on the picture pixel matrix, that is, the corresponding positions of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More