

Intelligent empty bottle detection robot bottle bottom positioning method
A positioning method and robot technology, applied in instruments, measuring devices, scientific instruments, etc., can solve problems such as inability to achieve high-speed and high-precision bottle bottom positioning, defects in the area of anti-skid lines, and no use of anti-skid lines, achieving high speed and execution speed. Fast, strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
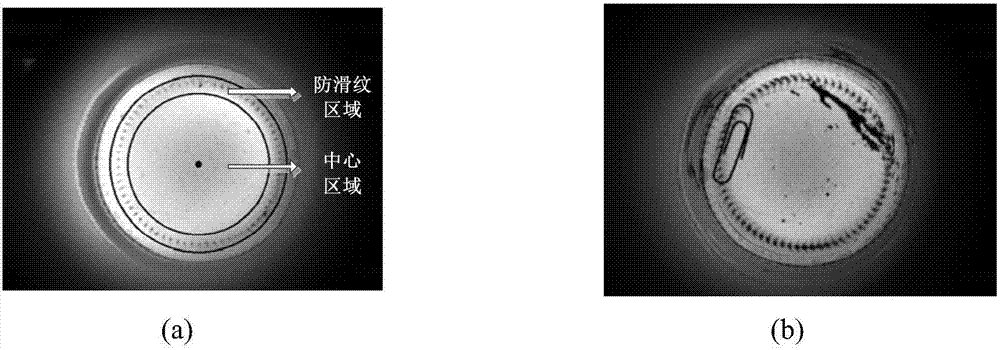
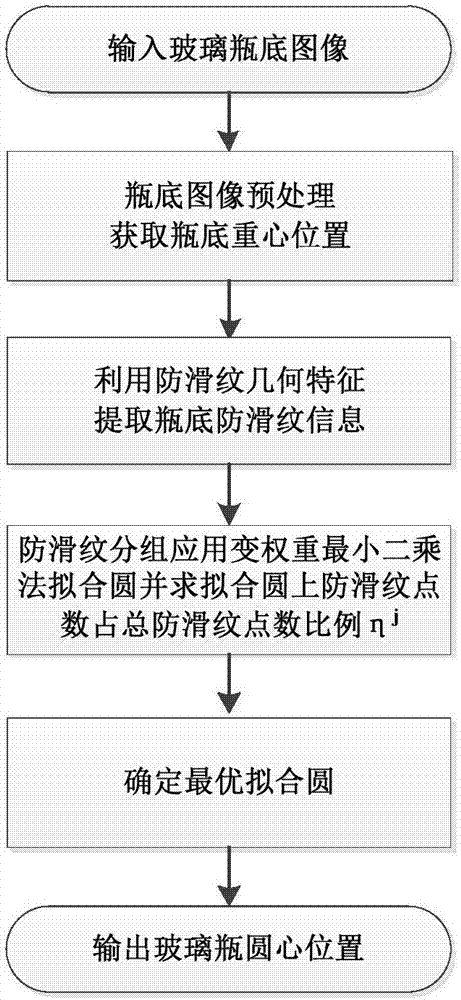
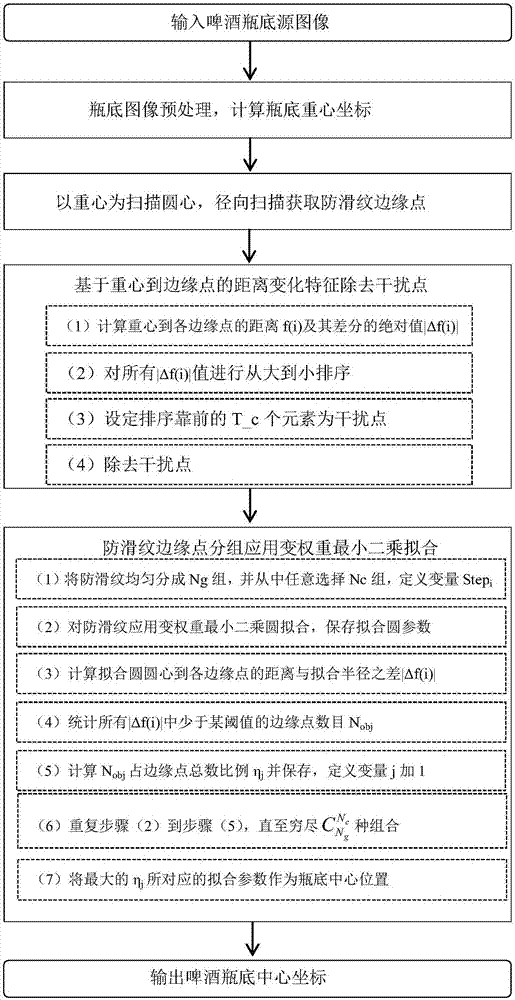
[0069] figure 1 (a) and (b) are the source images of the normal and intact bottle bottom and the bottom of the bottle with foreign body occlusion and continuous interference, respectively, where the anti-skid pattern and the inner area are marked with closed black solid lines, figure 2 and image 3 Respectively, the general block diagram of the glass bottle bottom positioning method flow process and the specific flow diagram of the present invention, the specific steps are as follows:
[0070] (1) The center of gravity method obtains the approximate position of the center of the bottom of the bottle.
[0071] First, the collected image of the bottom of the empty beer bottle is subjected to global threshold segmentation processing to obtain a binarized image of the bottom of the bottle, as shown in formula (1), where x and y represent the x and y coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More