

Infrared image and radar data-based night unmanned parking lot scene depth estimation method
A radar data and scene depth technology, applied in image data processing, image enhancement, image analysis, etc., can solve the problems of manual selection of features, inability to mine deep image feature information, etc., to achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
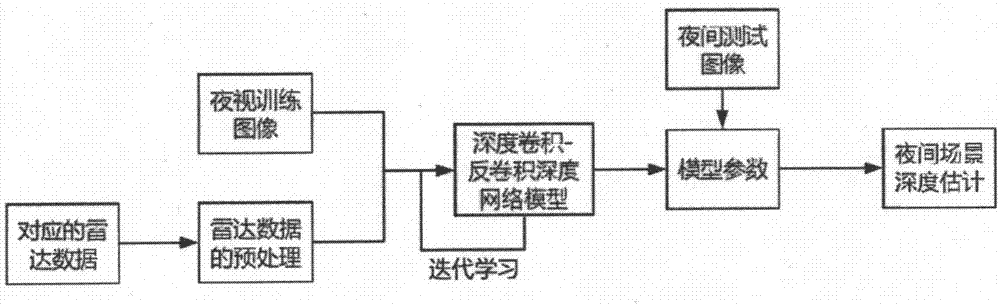
[0021] figure 1 Shown is the flow chart of scene depth estimation for unmanned vehicles at night based on infrared images and radar data. The method of scene depth estimation for unmanned vehicles at night based on infrared images and radar data first needs to process the radar data with default values, and then perform The classification operation obtains the depth category corresponding to the night vision image. Then const...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More