

Stability integrated control method for intelligent wheel and electric driven automobile
An integrated control and stability technology, applied in the direction of electrical digital data processing, special data processing applications, instruments, etc., can solve the problem that the system response time cannot achieve optimal control, the system robustness is weak, and the uncertainty of the vehicle model is not considered and external interference to achieve the effect of integrated control of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention provides a stability integrated control method of an intelligent wheel-electric drive vehicle. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention is further described in detail with reference to the accompanying drawings and examples. It should be pointed out that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
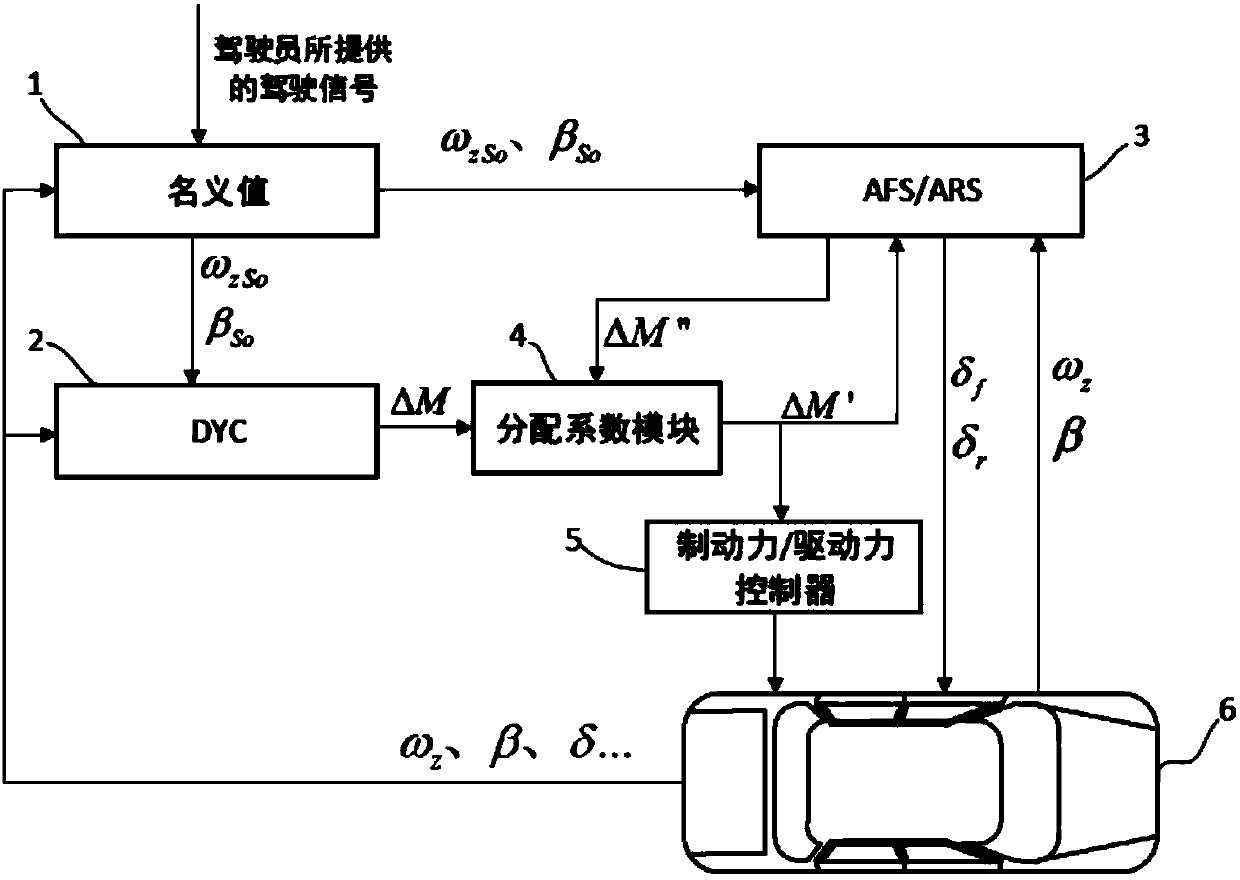
[0060] Control method of the present invention is:
[0061] 1) Collect or calculate the signals of parameters such as the vehicle's yaw rate, center of mass side slip angle, steering wheel angle, etc. through sensors and observers;
[0062] 2) Input the collected or calculated yaw rate, center-of-mass side slip angle, and steering wheel angle signals into the vehicle driving state nominal value calculator 1 to calculate the nominal values of the center-of-mass side slip angle and yaw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More