

Novel ankle joint rehabilitation robot and control method thereof
A technology for rehabilitation robots and ankle joints, applied in the field of rehabilitation robots, can solve problems such as small range of motion, and achieve the effect of good flexibility and high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
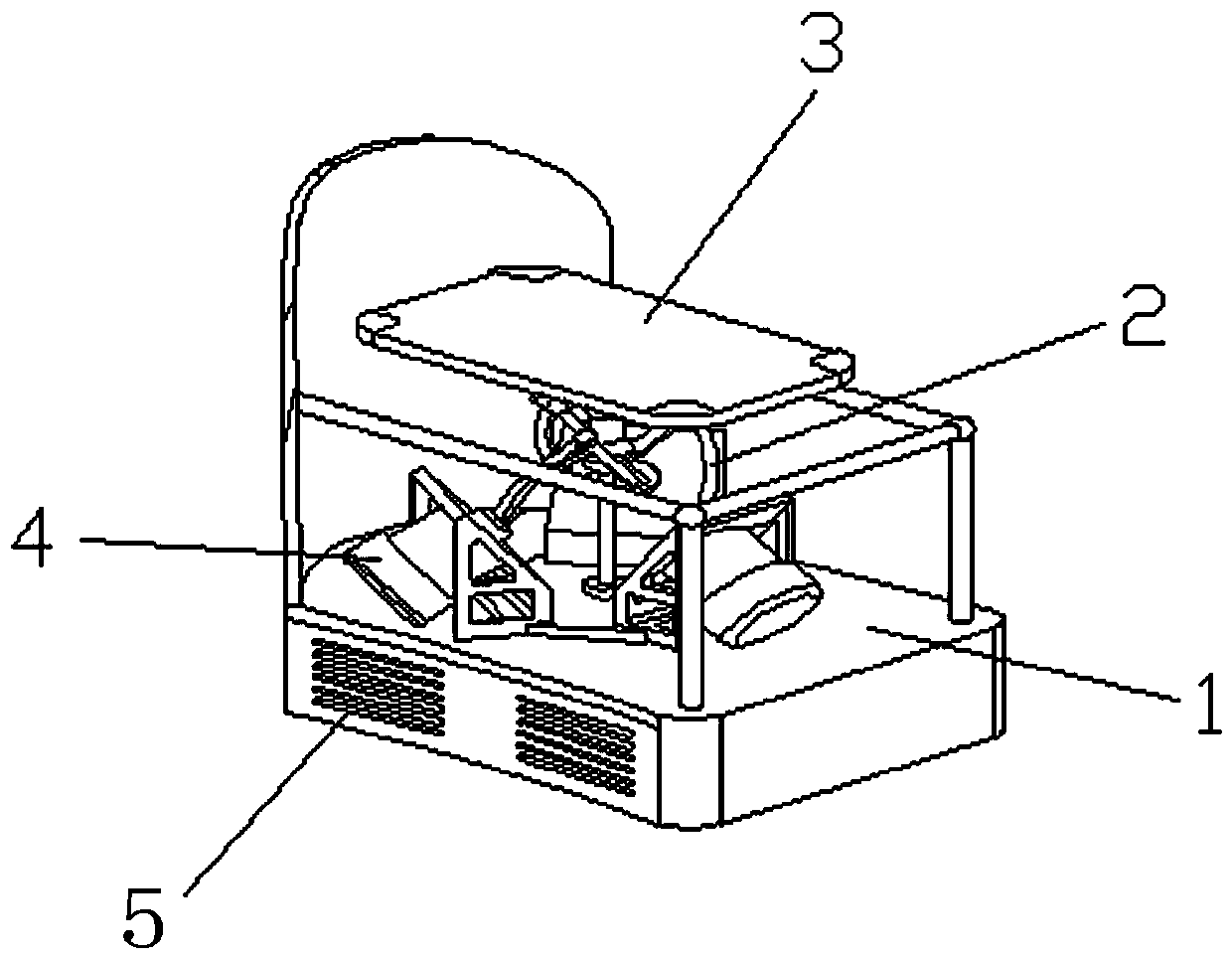
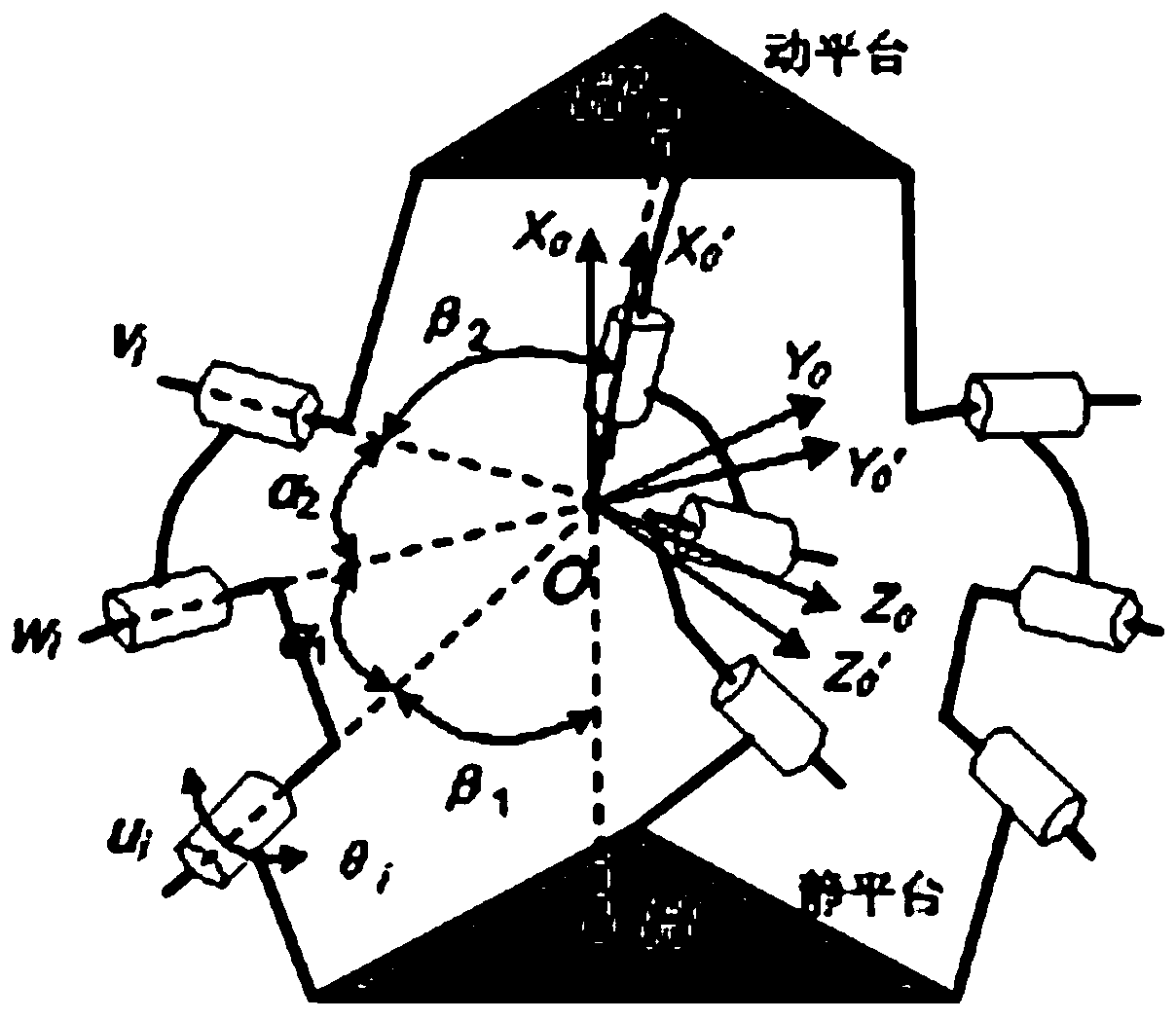
[0054] see Figure 1 to Figure 5 , a new type of ankle joint rehabilitation robot, including an electric control box 5, a base 1, a drive motor 4, an encoder, a 3-RRR spherical parallel mechanism 2 and a foot pedal 3; wherein, the 3-RRR spherical parallel mechanism 2 is located at the bottom Between the base 1 and the upper foot pedal 3, the 3-RRR spherical parallel mechanism 2 has three identical motion branch chains, and each branch chain is composed of three revolving pairs and two connecting rods. The 3-RRR spherical mechanism is A typical spherical parallel mechanism (SPM) has three pure rotation degrees of freedom, and the rotation axes intersect at one point, which is the rotation center of the 3-RRR spherical mechanism O point, the axis of each rotating pair of each kinematic branch chain also intersects at O point, first, at the center of rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More