

Fishing-oriented unmanned ship group collaborative self-organizing work system and method
An operating system and self-organizing technology, applied in the direction of control/regulation system, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as poor operation ability, inability to take into account the advantages of the operation process, and single function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings.
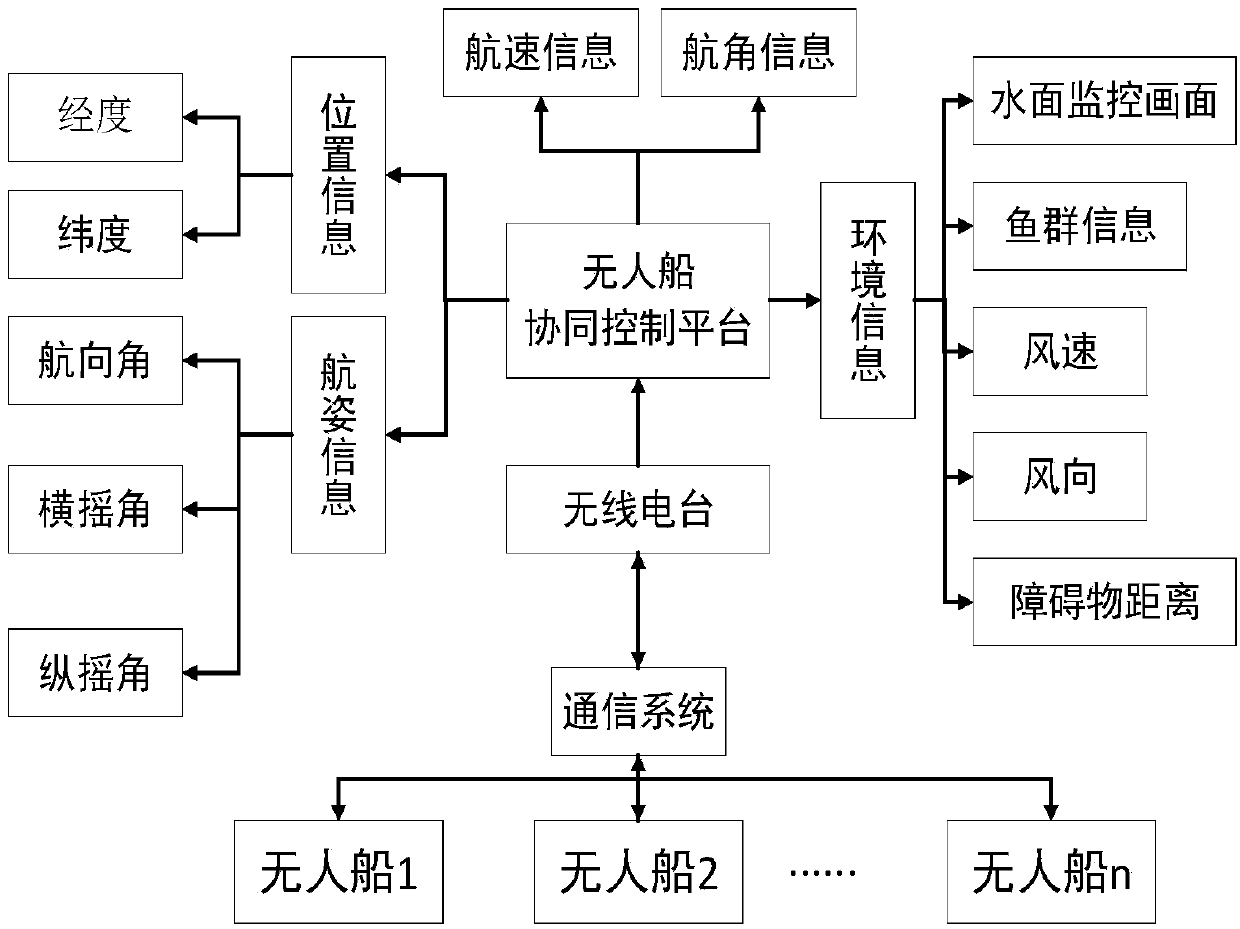
[0028] Such as figure 1 As shown, a fishery-oriented unmanned fleet cooperative self-organizing operation system is provided, which is realized by implementing the fishery-oriented unmanned fleet cooperative self-organizing operation method in the unmanned fleet cooperative self-organizing operation , including: wireless communication system based on radio station and multi-sensor integrated measurement and control system based on CAN bus;
[0029] The wireless communication system based on the radio station is used to complete data exchange between unmanned ships, and the cooperative self-organizing operation control is completed by the cooperative control platform;
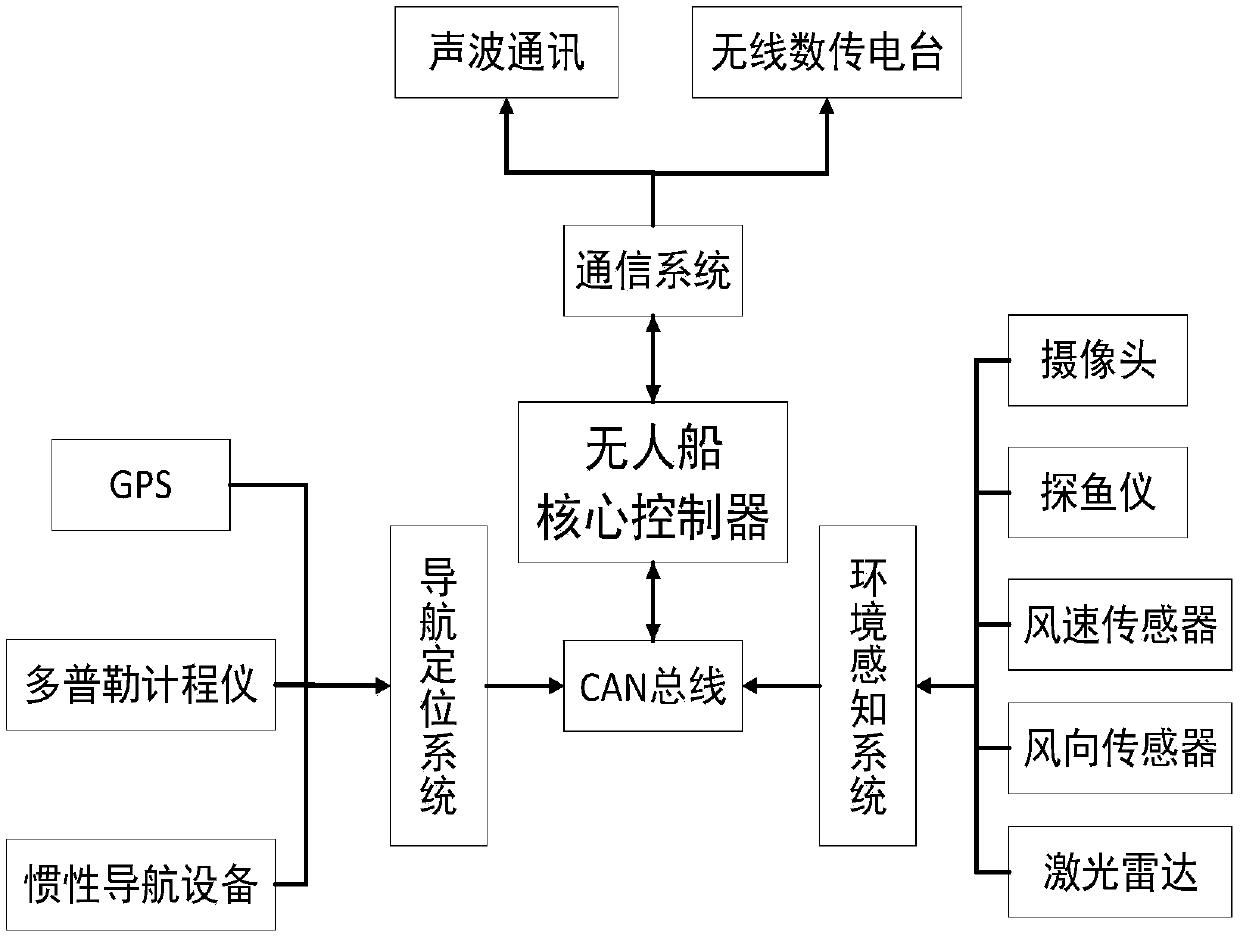
[0030] The multi-sensor integrated measurement and control system based on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More