

Positioning method for non-reflector laser navigation by adopting auxiliary
A technology of laser navigation and positioning method, applied in directions such as ground navigation, can solve the problems of not meeting the requirements of use and the reduction of laser beam accuracy, and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention discloses a non-reflective plate laser navigation positioning method using auxiliary objects. In the non-reflective plate laser navigation system, auxiliary objects are set on specific workstations with accuracy requirements, combined with relevant data of the mobile platform, Then calculate and correct the pose of the mobile platform in real time. Specifically include the following steps.
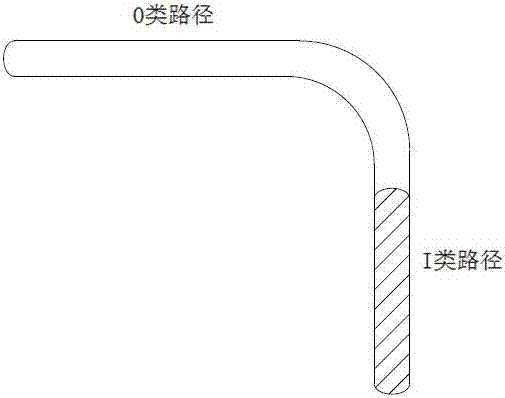
[0022] S1. The navigation path of the non-reflective laser navigation system is defined as a category 0 path, and a category I path with different color differences from the ground is set on a road section with accuracy requirements; the category I path with different color differences is obtained by laying ribbons or painting, The width is 15-25mm.
[0023] S2. The visual sensor installed on the mobile platform of the non-reflective laser navigation system, shoots the type I path at a certain frequency, and obtains the offset between the center line of the vision ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More