

UAV dynamic path planning method suitable for high-speed environment
A dynamic path and path planning technology, applied in non-electric variable control, vehicle position/route/altitude control, instruments, etc., can solve problems such as long stabilization time, complex system design, changing movement direction, etc., to reduce collisions. Risk, simplify system complexity, reduce the effect of closed loop
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
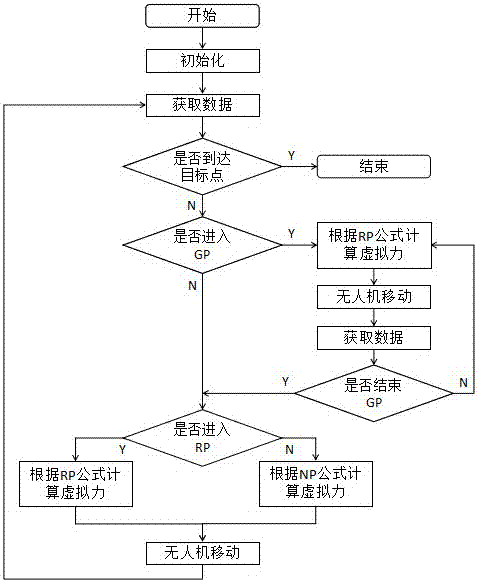
[0042] The specific steps of path planning are as follows:
[0043] (1) Set the target point coordinate c g And calculate the parameters, continue to step (2);
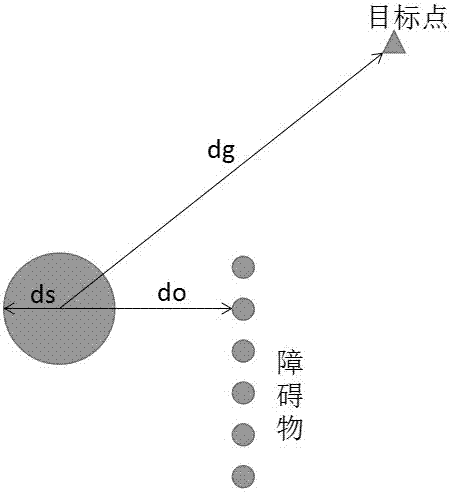
[0044] (2) Obtain the current position c and speed of the drone through the sensor Vector of drone pointing at obstacle Continue to step (3);
[0045] (3) To judge whether the target point is reached, the judgment conditions are:
[0046] Where ε v And ε d Is the set threshold, That is, the distance from the UAV to the target point; if the judgment condition is met, it is deemed to have reached the end point, and the path planning is ended. If it is not met, perform step (4);
[0047] (4) Judging whether to enter the stage of relief, the judgment conditions are:
[0048]
[0049] with Respectively represent the speed at time t and t-1, ε 1 Is the set threshold; if the judgment condition is met, it is deemed to have entered the stage of escape, and step (9) is executed; if it is not met, step (5) is executed;
[0050] (5) Ju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More