

A motor servo system error symbol integral robust adaptive control method
A robust self-adaptive, servo system technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve uncertain nonlinear problems and achieve the effect of ensuring control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
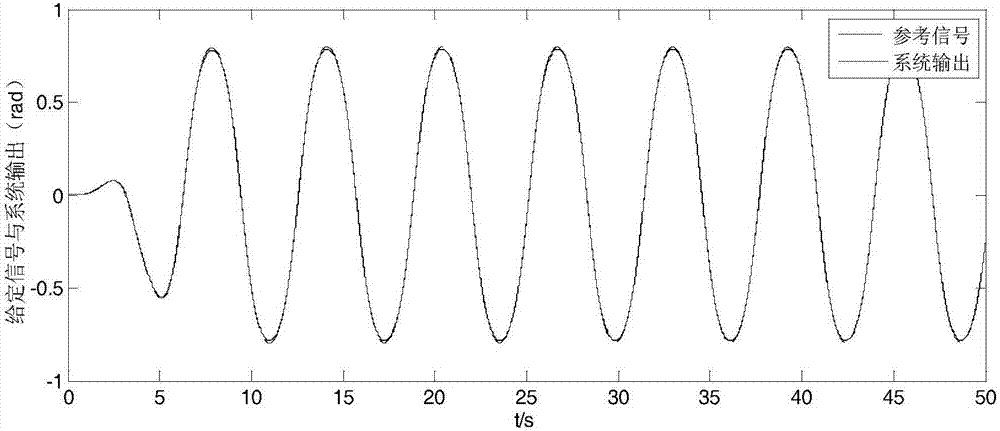
[0092] Simulation parameters: J equ =0.00138kg m 2 , B equ =0.4N m / rad,k u =2.36N·m / V. Take the controller parameter k 1 =12,k 2 = 1.5,k r = 1, θ 1n =0.02, θ 2n =0.294, the selected nominal value of è is far from the true value of the parameter, in order to examine the effect of the adaptive control law. The PID controller parameter is k p =90,k i =70,k d = 0.3. The given position is referenced to the input signal The unit is rad.
[0093] Disturbance (1) Under the condition of only constant disturbance and d n = 0.5 N·m. Disturbance (2) When constant disturbance and other unmodeled disturbance coexist, and d n =0.5N·m, Disturbance (3) When constant disturbances and other unmodeled disturbances coexist, and the input is limited, d n =0.5N·m, v=u·0.8.
[0094] See the effect of the control law Figure 3-Figure 9 :
[0095] image 3 It is the tracking process diagram of the system output of the controller to the given output under the action of disturba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More