

Virtual constraint-based automatic driving vehicle path planning method
A technology for automatic driving and vehicle routing, applied in vehicle position/route/altitude control, motor vehicles, road network navigators, etc., can solve problems such as limited differential GPS signal range and high-precision maps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principles of the present invention.
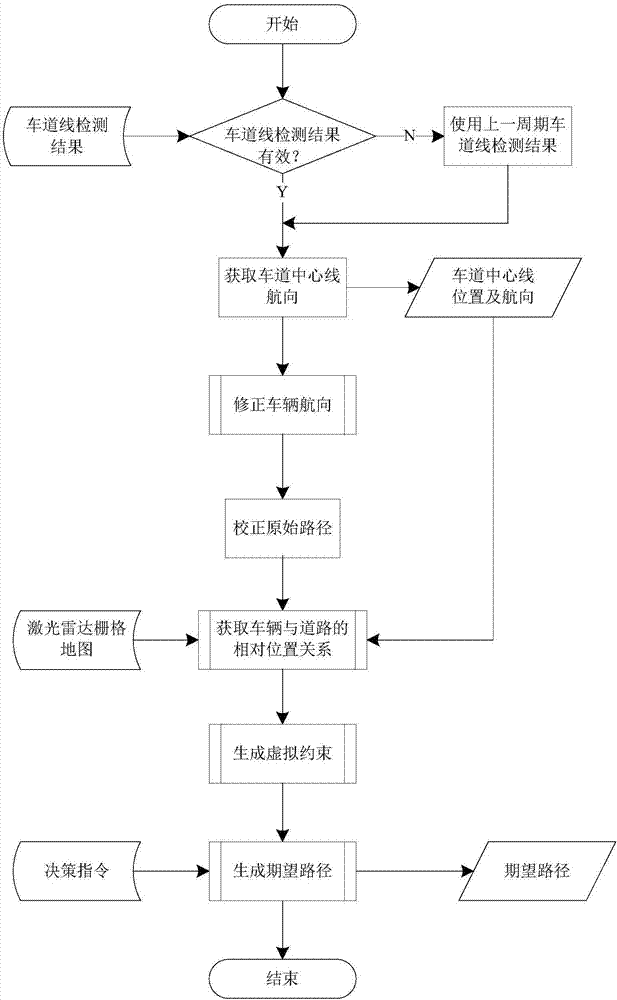
[0108] According to a preferred embodiment of the present invention, a method for path planning of autonomous vehicles based on virtual constraints is provided, such as figure 1 shown, including the following steps:
[0109] Step S1: Obtain the heading of the lane centerline in the car body coordinate system according to the lane line detection result;
[0110] Specifically, the step S1 also includes the following sub-steps:
[0111] Step S101: Determine whether the lane line detection result is valid, if valid, execute step S102; if invalid, continue to use the lane line detection result of the previous cycle;
[0112] In this embodiment, the self-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More