

Four-degree-of-freedom controllable mechanism-type palletizing robot
A palletizing robot and mechanism-based technology, applied in the field of machinery, can solve problems such as large mass and volume, large moment of inertia of the robot, and easy to generate large vibrations, and achieve high structural reliability, low cost, and good stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
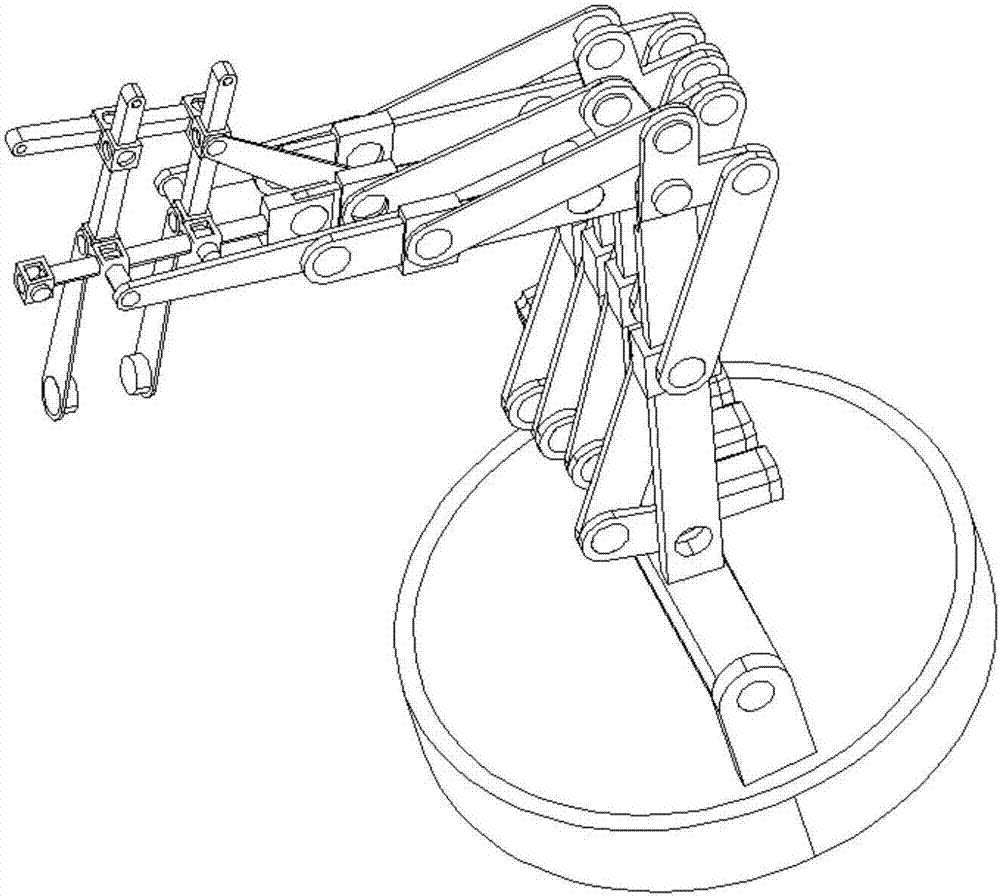
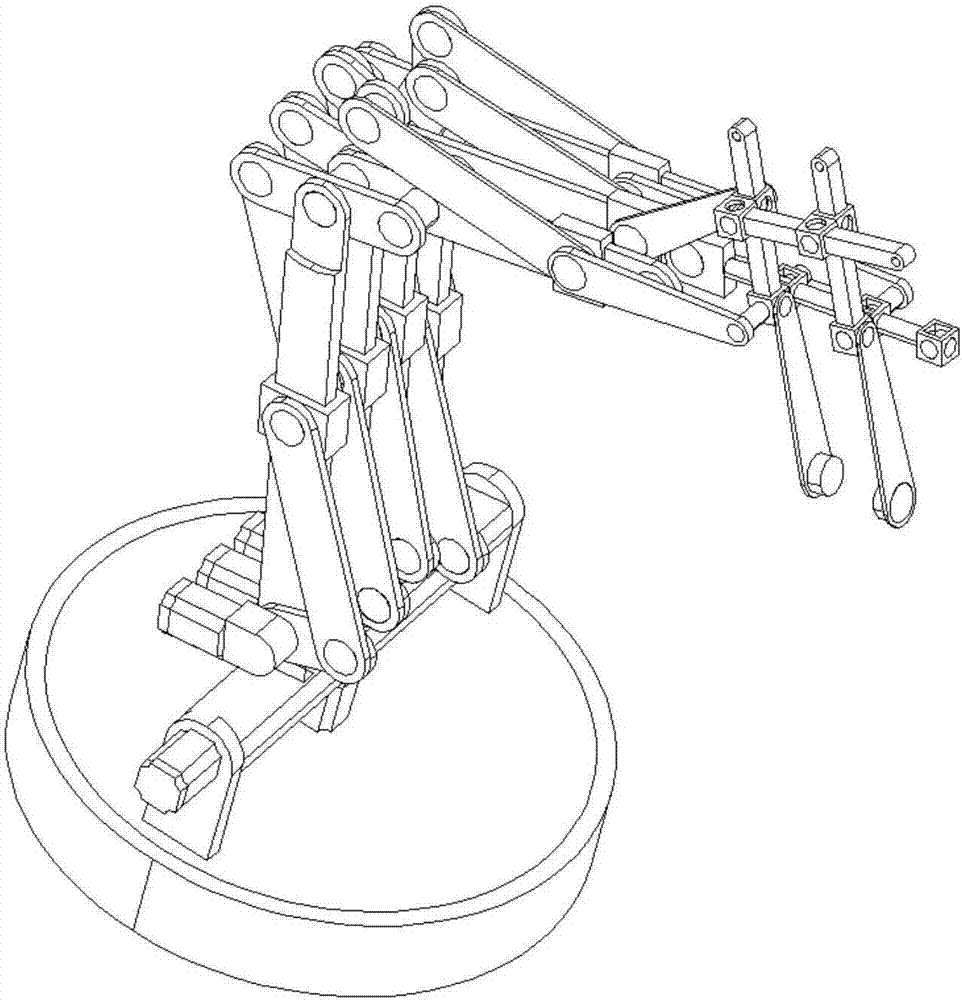
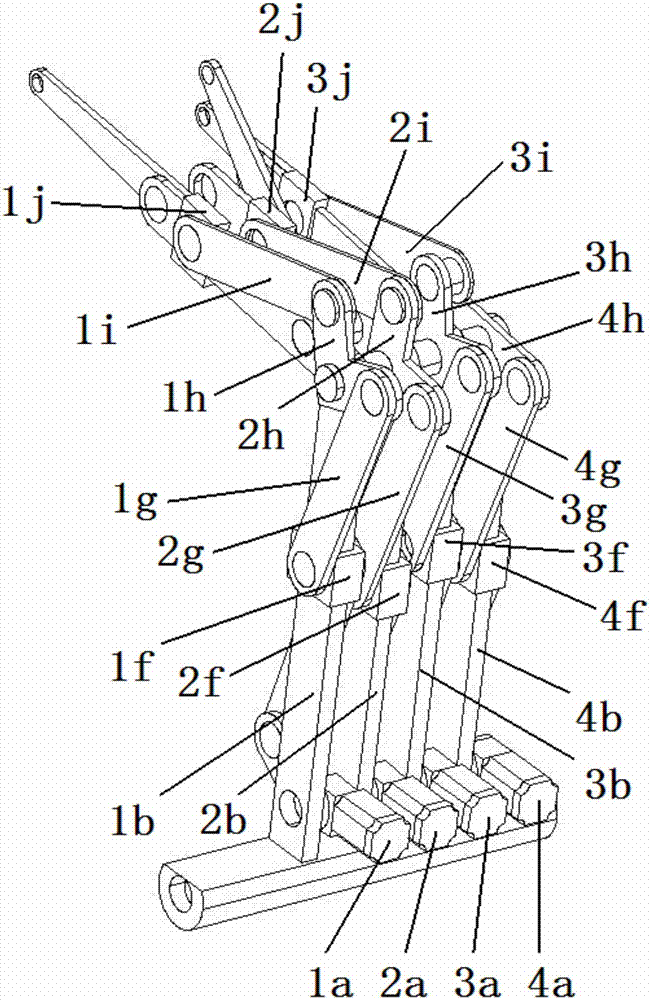
[0108] A four-degree-of-freedom controllable mechanism palletizing robot, including a first support rod 1b, a second support rod 2b, a third support rod 3b, a fourth support rod 4b, a first boom 1c, a second boom 2c, The third large arm 3c, the first active lever 1d, the second active lever 2d, the third active lever 3d, the fourth active lever 4d, the first primary driven lever 1e, the second primary driven lever 2e, the third primary driven lever Driving rod 3e, fourth primary driven rod 4e, first primary sliding sleeve 1f, second primary sliding sleeve 2f, third primary sliding sleeve 3f, fourth primary sliding sleeve 4f, first secondary driven rod 1g, first Secondary driven rod 2g, third secondary driven rod 3g, fourth secondary driven rod 4g, first triangle 1h, second triangle 2h, third triangle 3h, fourth triangle 4h, The fifth triangle 5h, the first three-stage driven rod 1i, the second three-stage driven rod 2i, the third three-stage driven rod 3i, the first secondary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More