

Four-degree-of-freedom double-push cylinder-type welding robot
A technology of welding robot and degree of freedom, which is applied in the field of machinery, can solve the problems of heavy robot arm, poor mechanism dynamic performance, joint error accumulation, etc., and achieve the effect of overcoming low overall rigidity, large space occupation and compact transmission structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
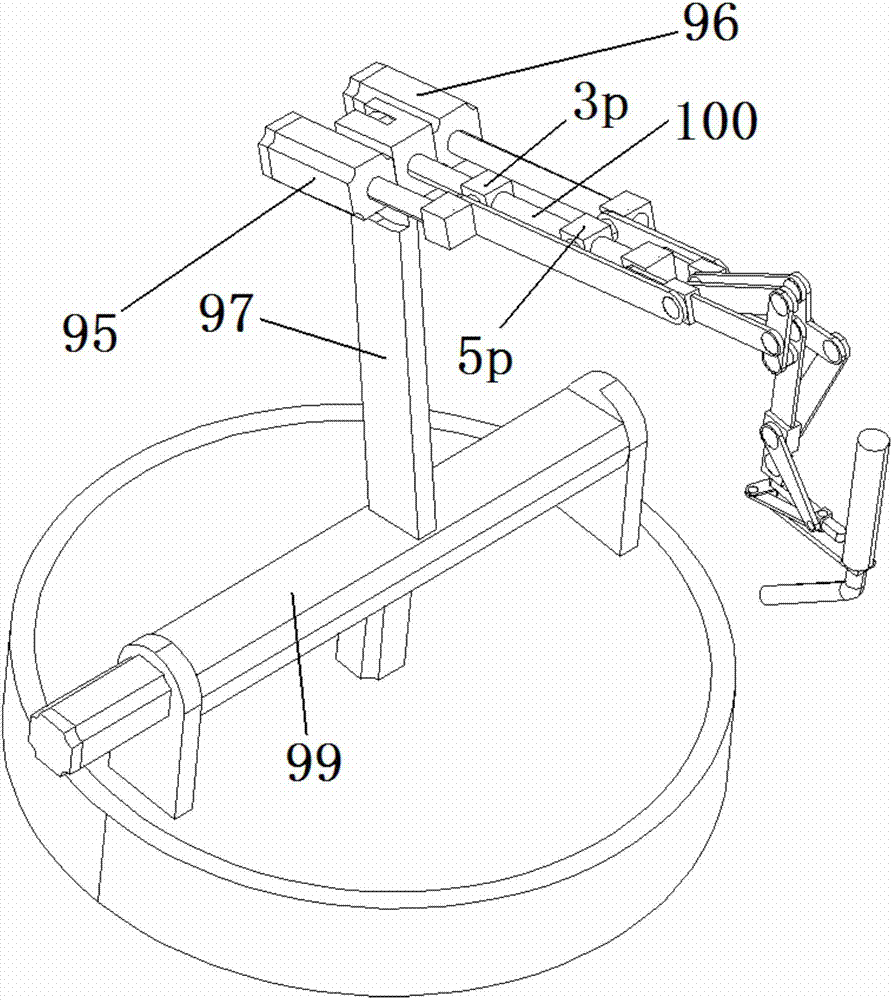
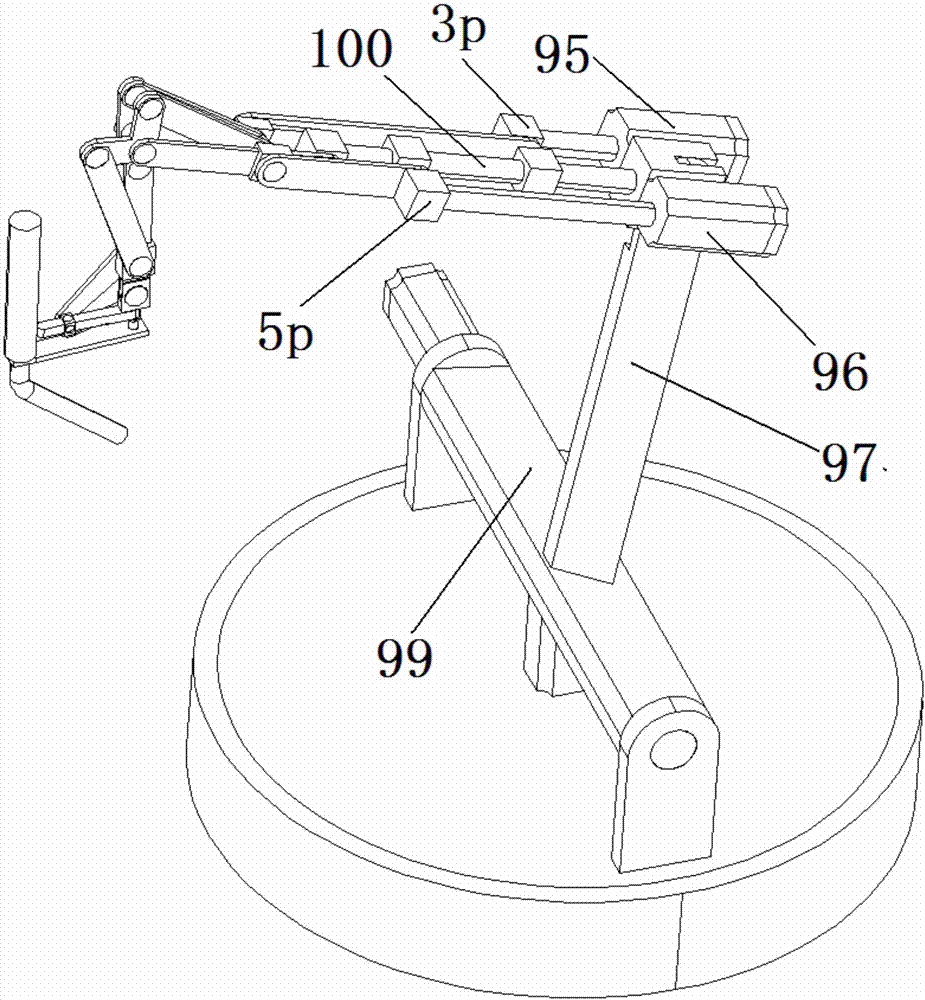
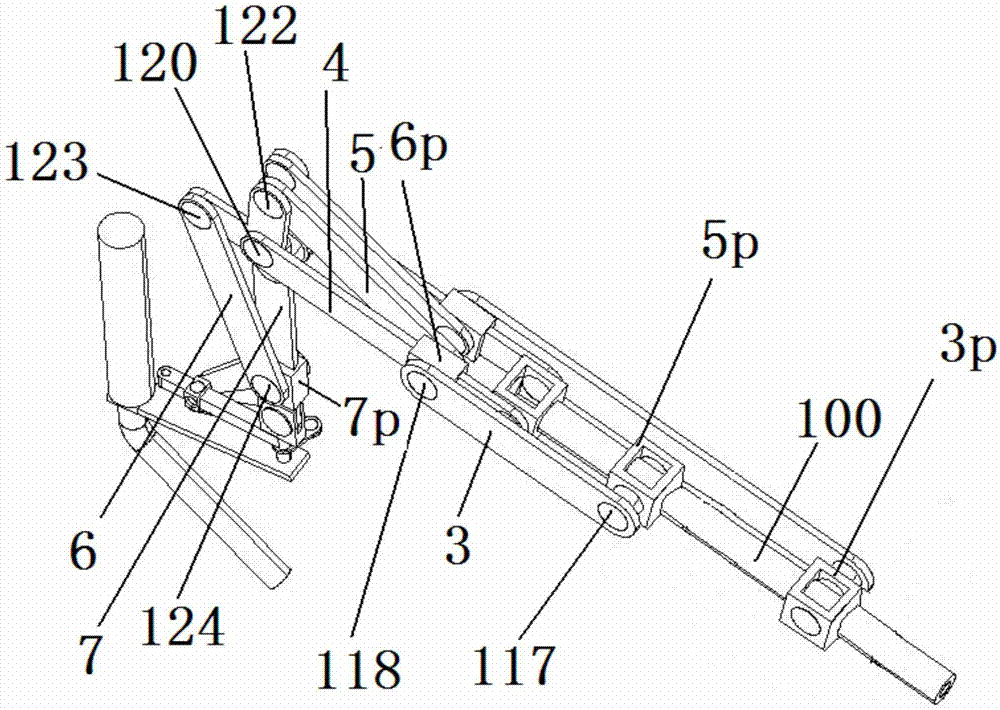
[0069]A four-degree-of-freedom double-push cylinder type welding robot, including a small arm 100, a frame 99, an actuator 98, a support rod 97, a guide rod 2q, a first electric push rod 96, a second electric push rod 95, a third slide Sleeve 3p, fifth sliding sleeve 5p, sixth sliding sleeve 6p, seventh sliding sleeve 7p, eighth sliding sleeve 8p, ninth sliding sleeve 9p, third connecting rod 3, fourth connecting rod 4, fifth connecting rod 5 , the sixth connecting rod 6, the seventh connecting rod 7, the eighth connecting rod 8, the ninth connecting rod 9, the tenth connecting rod 10, the eleventh connecting rod 11, the twelfth connecting rod 12, the thirteenth connecting rod 13. The fourteenth connecting rod 14 and the fifteenth connecting rod 15,
[0070] The specific structure and connection relationship are as follows:
[0071] Such as figure 1 and 2 Shown:
[0072] One end of the small arm 100 is connected to the upper end of the support rod 97 through the rotating j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More