

Lightweight five-degree-of-freedom high speed welding robot
A welding robot and degrees of freedom technology, applied in the field of machinery, can solve the problems of poor dynamic performance of the robot, large rotational inertia of the robot, easy to generate large vibration, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
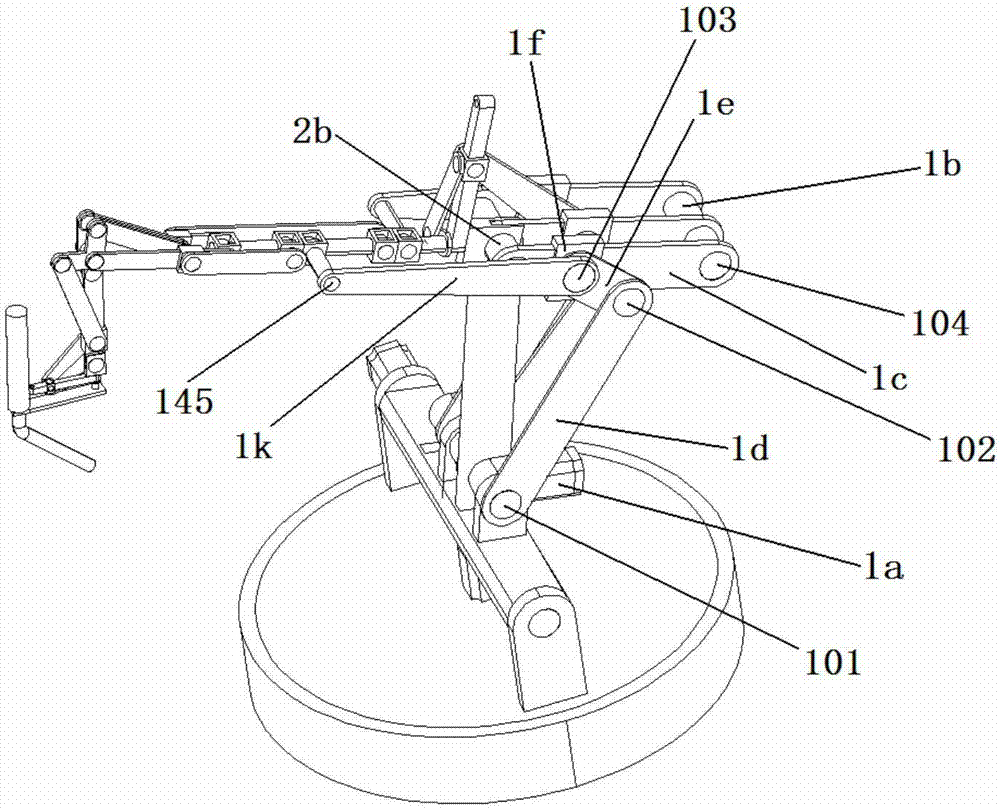
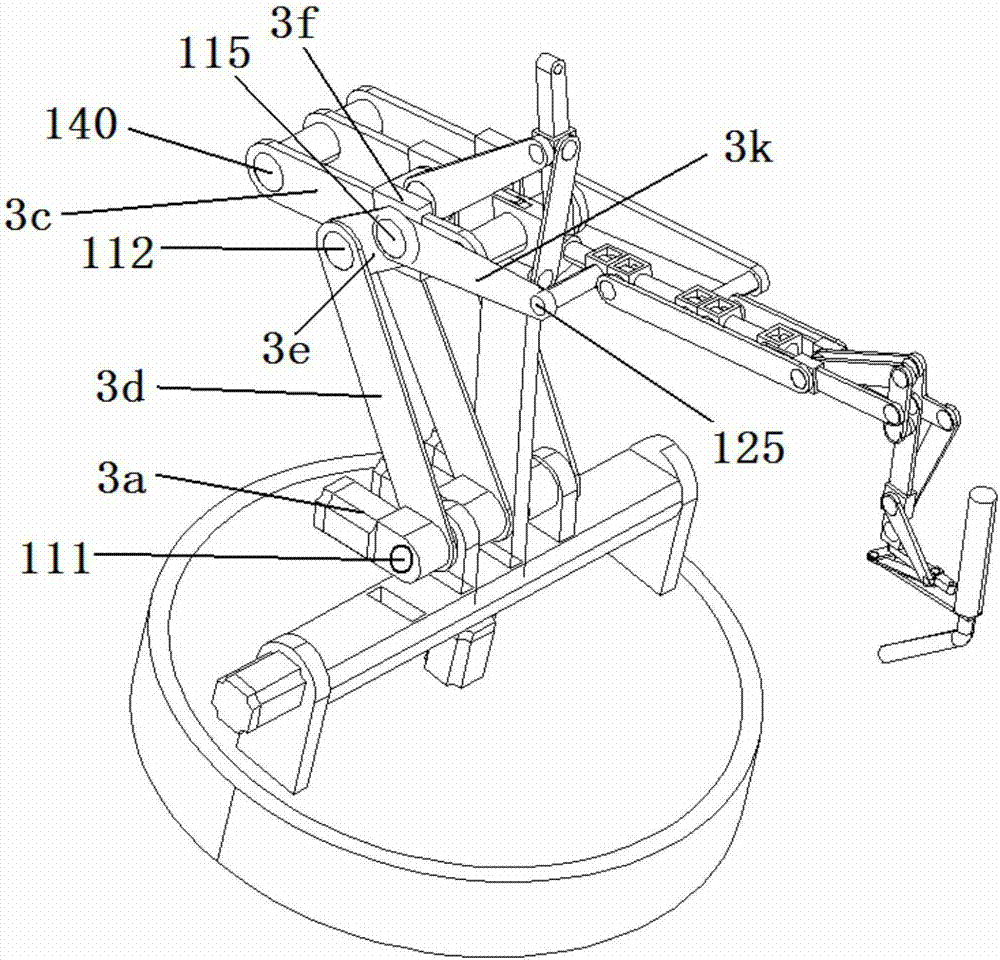
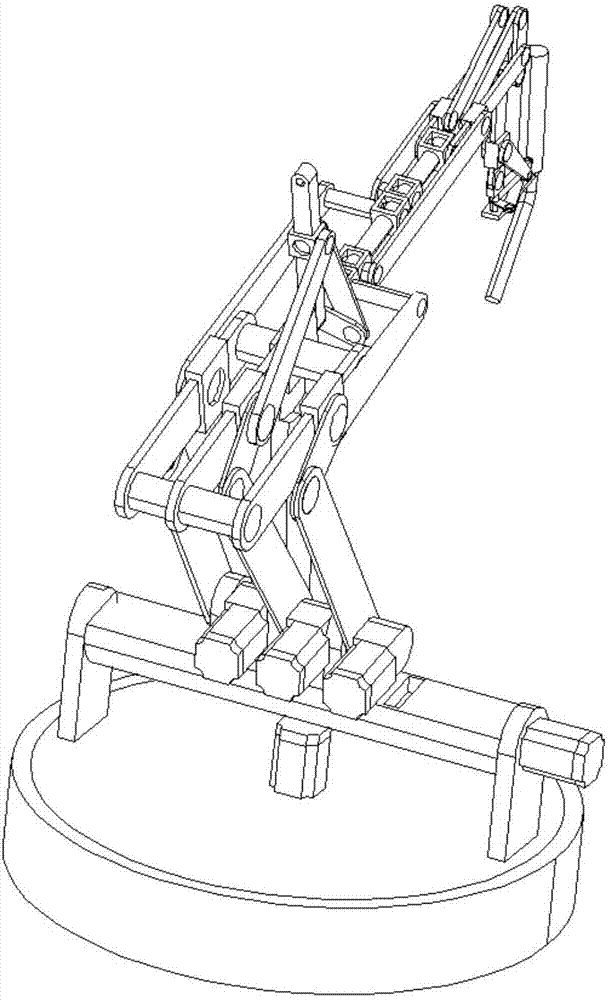
[0124] A lightweight five-degree-of-freedom high-speed welding robot, including a first rotating shaft 1b, a second rotating shaft 2b, a first arm 1c, a second arm 2c, a third arm 3c, a first active rod 1d, and a second active rod 2d, the third active rod 3d, the first primary driven rod 1e, the second primary driven rod 2e, the third primary driven rod 3e, the first primary sliding sleeve 1f, the second primary sliding sleeve 2f, the third primary sliding sleeve Set 3f, first final driven rod 1k, second final driven rod 2k, third final driven rod 3k, first connecting block 1n, second connecting block 2n, third connecting block 3n, first The last sliding sleeve 1p, the second final sliding sleeve 2p, the third final sliding sleeve 3p, the fourth final sliding sleeve 4p, the fifth final sliding sleeve 5p, the sixth final sliding sleeve 6p, the seventh final Sliding sleeve 7p, eighth final sliding sleeve 8p, ninth final sliding sleeve 9p, first guide rod 1q, second guide rod 2q,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More